V
主页
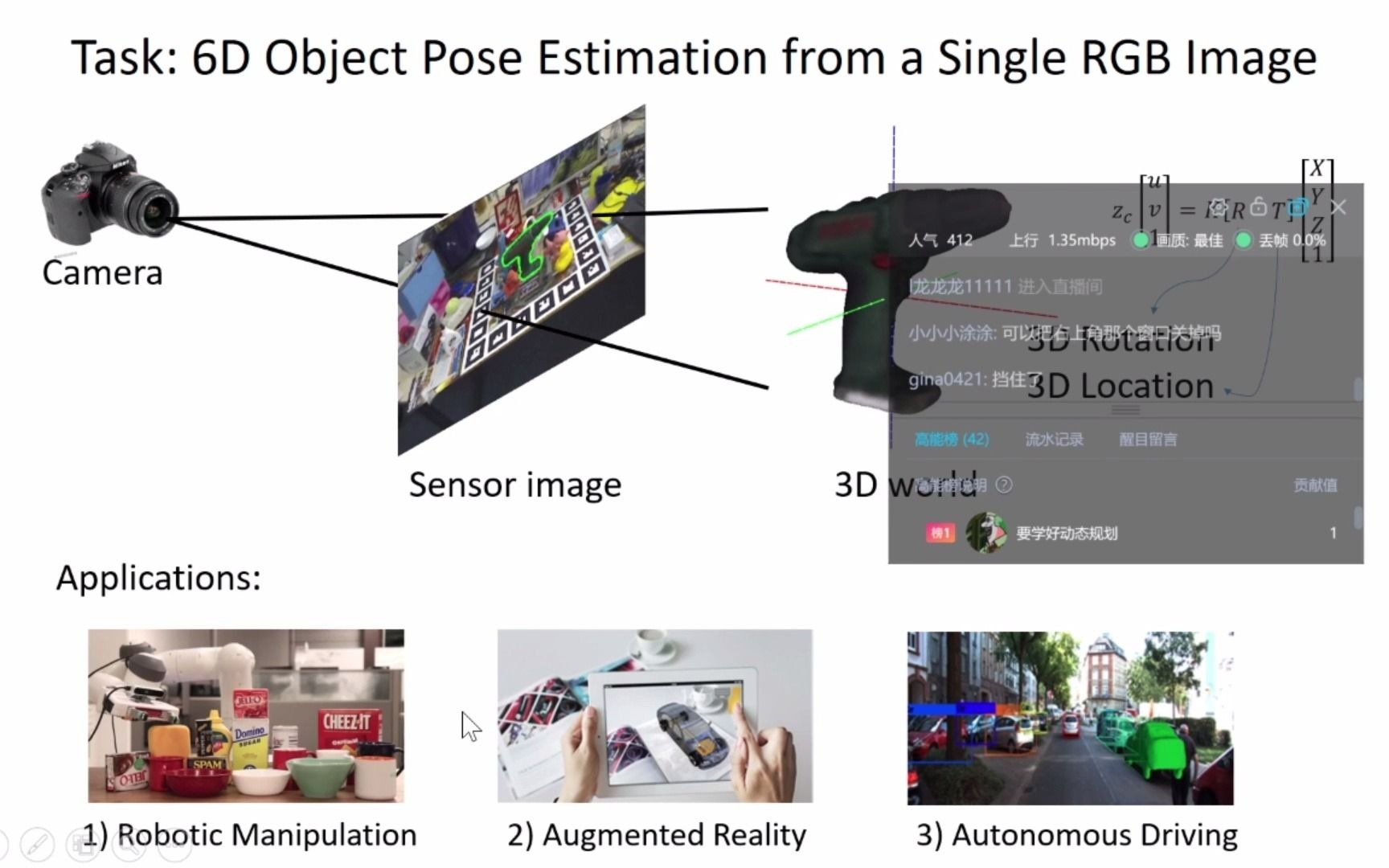
基于几何信息指导的单目6D物体姿态直接回归算法
发布人
主讲嘉宾: 王谷,清华大学自动化系BBNC Lab在读博士生,导师为季向阳教授,主要研究方向为基于深度学习的6D物体姿态估计,相关研究成果曾发表于ECCV, ICCV, CVPR及IJCV等会议和期刊。 主讲内容: 1. 物体姿态估计简介 2. 基于CNN的单目物体姿态估计的前沿方法 3. 深入回顾6D姿态直接回归法的近期进展 4. GDR-Net: 一种基于几何指导的单目6D姿态直接回归法 小助理微信:CV_LAB
打开封面
下载高清视频
观看高清视频
视频下载器
CVPR满分论文!即插即用的6D物体姿态估计大模型(BOP排行榜第一)
绪论|单目相机标定理论及张正友标定法(上篇)
单目深度估|动态物体处理方法
如何高效学习单目深度估计?
太稳啦!Gaussian Splatting杀入6D物体位姿估计!
CVPR2024开源NetTrack:跟踪高动态物体!
这绝对是质量最高的单目深度估计开源方案!
让NeRF动起来!PhysGaussian:生成任何物体的真实运动!
Depth Anything!最强开源单目深度估计SOTA!
单目深度估计|连续帧方法实战课
速度提升10倍以上!Depth Anything V2更稳健、精细的单目深度估计
互补滤波姿态估计、卡尔曼滤波姿态、高度估计
麻省理工:解决物体级SLAM中姿态歧义的多假设方法(IROS 2021)
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
BMVC'24开源 | BaseBoostDepth:更强大的自监督单目深度估计
用于场景渲染的几何感知高斯抛雪球算法
多视图几何MVS简介及MVSNet如何高效入门?
相机标定的基本原理与经验分享
无需额外训练!SAMPro3D:零样本3D分割一切!
大作业|激光-视觉-IMU-GPS融合SLAM算法
苏黎世联邦理工:利用事件相机进行单目稠密深度估计
单目无监督深度估计综述
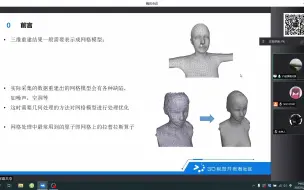
三维重建中的网格处理算法分享(公开课)
最新CVPR2020论文:SuperGlue(超级胶水):用图神经网络来做图像匹配,超越现有所有匹配算法
极快跟踪一切!DOT:无惧遮挡!
OA-SLAM:在视觉SLAM中结合物体语义进行相机重定位[ISMAR 2022]
无人机|PID算法详解与实战(上)
深度相机概述
代码开源!伦敦大学学院:DSP-SLAM:物体特征级SLAM
【3D视觉工坊】第八期公开课:立体视觉之立体匹配理论与实战
无人机|几何约束下多旋翼无人机的全状态在线轨迹规划
视觉顶刊IEEE TPAMI2019:基于自监督学习的实时3D姿态识别(代码开源)
最新!无人机动态环境感知&规划新思路!
光学3D测量技术原理及应用
三维点云系列视频——第一章绪论
Open3D与点云处理简介(公开课)
四旋翼无人机-PX4控制算法原理
SIGGRAPH 2021,AI武术指导化!帮助动画师生成武术动作!
NeurlPS 2023 扩散模型对光流和单目深度估计的惊人有效性!
[ICCV 2021] 基于水体流动的可微框架进行水下单目3D重建