V
主页
ECCV2020,循环神经网络自由合成任意视角图像,代码开源!效果惊艳!
发布人
https://www.youtube.com/watch?v=JDJPn3ZtfZs 来自英特尔的工作,发表在ECCV2020上,效果惊艳!本文利用其他角度的视图,经过特征编码之后,用估计的深度和角度进行变形,转换到目标视角下。随后使用Unet为GRU单元的循环神经网络输出多个预测图像和置信度,随后依照置信度进行加权求和,获得最终的图像。由于是循环神经网络,因此可以有任意多个输入帧进行新视角视图预测。具体效果请看视频!
打开封面
下载高清视频
观看高清视频
视频下载器
光学3D测量技术原理及应用
牛津VGG团队最新开源!Flash3D:一张图像重建整个3D场景!通用性超强!
LVI-SAM代码实战与评估
Open3D与点云处理简介(公开课)
清华最新开源MARS!第一个基于NeRF的自动驾驶开源模拟器!
Nature子刊!MARS实验室最新开源:基于LiDAR点流的运动事件检测!
国内首个面向具身智能方向的理论与实战系统课程
如何轻松拿捏LIO-SAM-数学基础篇
CVPR'24开源|NeRF-SLAM新SOTA:请任意选择你的高效神经
无需额外训练!SAMPro3D:零样本3D分割一切!
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
PID控制器原理讲解
清华最新开源万能3D分割一切!
CVPR 2024开源 VSRD:无需LiDAR和标注使用2D渲染解决3D检测的新范式!
速度提升10倍以上!Depth Anything V2更稳健、精细的单目深度估计
相机标定的基本原理与经验分享
ECCV'24开源 | 拳打ORB3脚踢DROID!强化学习+VO=精度暴涨19%!
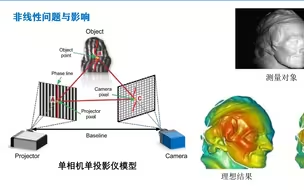
结构光的非线性问题与校正
深度相机概述
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!-上篇
四旋翼无人机-PX4控制算法代码
自驾场景 快速训练!CarDreamer:首个开源世界模型自动驾驶平台
什么?不做时间同步也可以实现LiDAR-相机三维重建?
基于面结构光的高反射物体重建方法关键技术分享[相位偏折术]
大作业|激光-视觉-IMU-GPS融合SLAM算法
Depth Anything!最强开源单目深度估计SOTA!
极快跟踪一切!DOT:无惧遮挡!
CVPR'24开源 通过3D GS进行整体城市3D场景理解!
Python之课前准备
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
Occupancy Networks后处理
从零搭建一套结构光3D重建系统 [理论+源码+实践]
三维点云系列视频——第一章绪论
聊一聊我对工业目标检测的看法
这绝对是质量最高的单目深度估计开源方案!
CVPR2024开源NetTrack:跟踪高动态物体!
[CVPR2022] 能换全身发型、服装的Gan网络(代码开源)
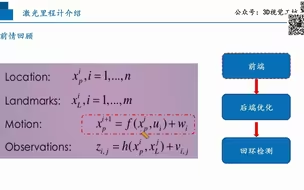
激光里程计精讲(上)
最新CVPR2020论文:SuperGlue(超级胶水):用图神经网络来做图像匹配,超越现有所有匹配算法