V
主页
京东 11.11 红包
【ICRA2021】PSF-LO:基于参数化语义特征的激光雷达里程计
发布人
激光雷达里程计 (LO) 是众多可靠且准确的自动驾驶定位和建图系统中的一项关键技术。最先进的 LO 方法通常利用几何信息来执行点云配准。此外,获得更丰富地描述环境的点云语义信息将有助于注册。我们提出了一种基于自行设计的参数化语义特征(PSF)的新型语义激光雷达里程计方法,以实时实现自动驾驶汽车的低漂移自我运动估计。我们首先使用基于卷积神经网络的算法从输入的激光点云中获取逐点语义,然后使用语义标签将道路、建筑物、交通标志和杆状点云分开并分别拟合得到相应的 PSF .基于 PSF 的快速匹配使我们能
打开封面
下载高清视频
观看高清视频
视频下载器
【ICRA2021】3475-OV2SLAM:用于实时应用的完全在线和通用的视觉SLAM
【ICRA2021】自动驾驶汽车的轻量级语义网格建图
【ICRA2021】固态激光雷达的轻型三维定位和建图
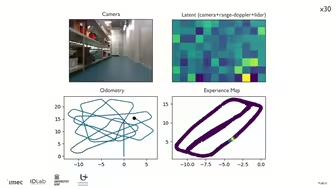
【ICRA2021】LatentSLAM:用于定位和建图的无监督多传感器表示学习
【ICRA2021】VOLDOR+SLAM:当基于功能或直接的方法还不够好的时候
1-1课程内容与预备知识
【ICRA2021】直接稀疏双目视觉-惯性全局里程计
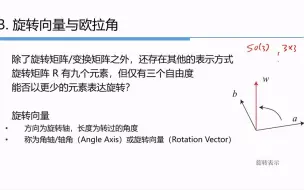
2-3 旋转向量和欧拉角
【ICRA2021】协同视觉惯性里程计
【ICRA2021】基于点云的城市尺度场景变化检测
【ICRA2021】3508-ERASOR:一种基于栅格占据情况之差异的动态物体过滤方法
【ICRA2021】自主室内导航中激光雷达分割的自监督学习
【ICRA2021】自动驾驶和地图学习的定制地标表示的自动建图
【ICRA2021】用于特定领域重定位的同步多级描述符学习和语义分割
【ICRA2021】相机IMU UWB的距离聚焦融合用于精确和减少漂移的定位
轮式里程计激光里程计视觉里程计区别是什么
【ICRA2021】里程计辅助视觉惯性 SLAM 的双向轨迹计算
【ICRA2021】TT-SLAM:用于平面环境的密集单目 SLAM
【ICRA2021】RELLIS-3D 数据集:数据、基准和分析
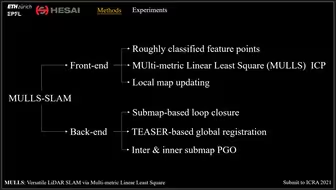
【ICRA2021】MULLS:多度量线性最小二乘法的多功能激光雷达SLAM
【ICRA2021】基于训练数据自动生成的动态对象感知 LiDAR SLAM
【ICRA2021】ENCODE:一个深点云里程计网络
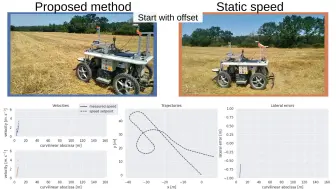
【ICRA2021】轮式越野移动机器人的在线速度波动:一种强化学习方法
【ICRA2021】半动态环境中的终身定位
5-1 特征点提取与匹配
【ICRA2021】LiDAR和相机的基于线的自动外部校准
【ICRA2020】Loam_livox:一个快速、健壮、高精度的激光雷达里程计和测绘软件包,用于小视场激光雷达
【ICRA2021】移动机器人 3D 三角形网格上的连续最短路径矢量场导航
【4K画质】LIO-SAM:紧耦合的实时激光雷达惯性里程计和建图
【ICRA2021】连接语义建筑信息模型和机器人:基于2D LiDAR的定位应用
【ICRA2021】3647-使用相对深度先验的偏振单目稠密建图
【ICRA2021】用于机器人应用的 LiDAR 里程计的自监督学习
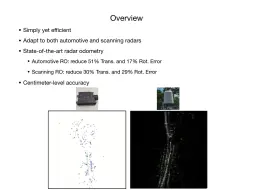
【ICRA2021】为扫描雷达和车载雷达设计的基于正态分布变换的雷达里程计
【ICRA2021】视觉惯性里程计的等变滤波器
2-2 旋转矩阵
反光柱定位算法-重复定位精度测量(实测重复定位数据1cm以内)
【ICRA2021】LiDARNet:用于点云语义分割的边界感知域适应模型
【ICRA2021】大规模环境下基于语义直方图的图形匹配实时多机器人全局定位
【ICRA2021】单目直接视觉里程计中基于特征的重定位的紧密集成
【ICRA2021】分层驾驶模型的模仿学习:从连续意图到连续轨迹