V
主页
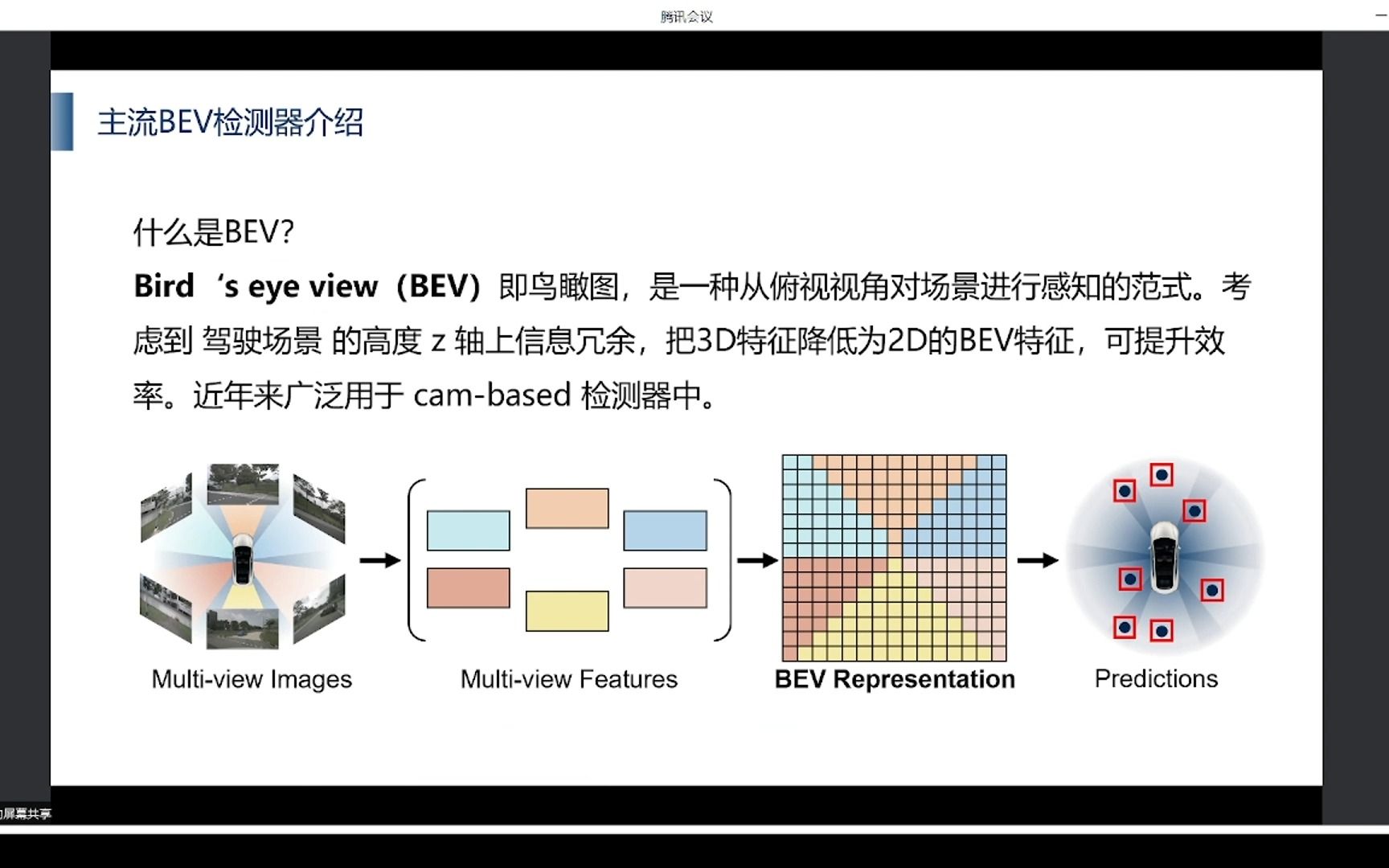
【CVPR2023】 自动驾驶场景下理解BEV目标检测的鲁棒性
发布人
自动驾驶之心很荣幸邀请到上海交通大学的朱子健博士,本次分享主要围绕CVPR2023的最新论文进行,对3D目标检测器是否包含BEV表征下的鲁棒性展开详细介绍! 分享内容包括: 1、主流BEV检测模型 2、鲁棒性测试内容 3、鲁棒模型设计建议 自动驾驶之心官网正式上线了:www.zdjszx.com(海量视频教程等你来学) ①YOLOv3~YOLOv8/YOLOX/PPYOLO系列全栈学习教程 ②国内首个BEV感知全栈学习教程(纯视觉+多传感器融合方案) ③多传感器融合中的毫米波雷达-视觉融合感知全栈教程 ④Lidar+Radar+Camera+IMU离线/在线近20+标定方案教程等你来学 ⑤模型部署实战:基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速 ⑥规划控制理论&实战课程:PID、LQR、MPC全掌握 ⑦多传感器融合目标跟踪课程:基于贝叶斯/卡尔曼滤波的目标跟踪技术详解 课程咨询联系AIDriver004,科研合作及辅导联系AIDriver002。
打开封面
下载高清视频
观看高清视频
视频下载器
直播分享!最新SOTA,多模态3D目标检测新方案(CVPR2023)
在线高精地图与城市NOA是什么关系?为什么如此重要?
超全超简单!一口气刷完YOLO、SSD、Faster R-CNN、Fast R-CNN、Mask R-CNN、R-CNN等六大目标检测常用算法!真的比刷剧还爽!
【全463集】禁止自学走弯路!环境感知、目标检测、语义分割、强化学习、决策与控制算法等八大自动驾驶核心算法一口气学完!
面试必备!自动驾驶中BEV常考知识点大串讲
强推!OpenCV+YOLO 实时目标检测实战教程,最详细的学习路线+技能介绍,毕设成功拿下!(深度学习丨计算机视觉丨YOLO丨OpenCV | 人工智能)
爆肝整理!CVPR2024可复现论文合集,原文/代码/演示全都有!(深度学习/计算机视觉)
细谈目标检测中的小目标检测头和大目标检测检测头,并教懂你怎么加微小目标、极大目标检测头!
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
比刷剧还爽!【OpenCV+YOLO】终于有人能把OpenCV图像处理+YOLO目标检测讲的这么通俗易懂了!J建议收藏!(人工智能、深度学习、机器学习算法)
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
目标检测只能玩YOLO?这三大算法:DETR、MaskRcnn及FasterRcnn同样拥有不小的竞争力,听同济大佬大白话讲学,三天快速上手!
英伟达最新!SCube:仅用三张图,就能实现即时大规模三维场景重建
MMdetection3D环境配置+项目实战:迪哥手把手带你基于MMdetection3D训练自己的数据集!(深度学习/计算机视觉/目标检测)
重磅开源!MARS:基于隐式场的场景感自动驾驶仿真
计算机视觉10天快速入门到起飞!Python/OpenCV/神经网络基础/PyTorch/CNN/目标检测/图像分割,迪哥200集带你全部吃透!
这才是科研人该学的【Opencv+Pytorch】教程!一口气学完目标检测、图像分割、语义分割、图像生成,算法原理+实验分析,太通俗易懂了!机器学习|深度学习
端到端自动驾驶:SparseDrive 算法详解
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
巨简单!这可能是B站讲的最细的计算机视觉(图像处理+目标检测+图像分割)全系列课程了,全是干货,比刷剧还爽!深度学习/人工智能/计算机视觉/CV
太详细了!多传感器融合的策略和方法
YOLOV8+DeepSort进行实时对象跟踪车辆计数-博士详解YOLOV8, 人流跟踪检测、物体检测、目标检测、毕业设计
零基础入门!一口气学完YOLO、SSD、FasterRCNN、FastRCNN、SPPNet、RCNN等六大目标检测算法!—深度学习_神经网络_计算机视觉
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
3D目标检测底层革新被ScartterFormer玩明白了!支持算子定制,实现灵活交互(ECCV2024 )
目标检测领域必学算法:YOLOV1~V11目标检测算法原理/部署/源码/应用全详解!半天搞定YOLO算法全家桶!(深度学习/计算机视觉)
【ResNet+Transformer】基于PyTorch的迁移学习残差网络Resnet,细胞分类任务、ViT、DERT目标检测
2022最新 | HybridNets:端到端感知网络(检测+可行使区域分割+车道线三大任务)
CVPR'23 | OCTraN:非结构化交通场景中的3D占用卷积Transformer网络
YOLO11目标检测教程 Label-studio制作数据集
目标检测再登Nature正刊!最新突破性进展,精确度提升300%!
什么是端到端自动驾驶?什么是基础world model?
【CVPR 2024】刷爆榜单!SAFDNet:纯稀疏点云检测问鼎Waymo
视觉3D检测如何做自动标注?
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
特斯拉的World Model是什么?怎么做端到端训练?
CVPR2022 | MeMOT:具有记忆的多目标跟踪
CVPR2023 | 利用神经辐射场提升全景三维场景理解的能力
最新3D多目标跟踪方法DirectTracker:基于直接图像对齐和光度学束调整的3D多目标跟踪(IROS2022)
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?