V
主页
速度和精度双SOTA! TPAMI 2022最新车道线检测算法(Ultra-Fast-Lane-Detection-V2)
发布人
速度和精度双SOTA! TPAMI 2022最新车道线检测算法(Ultra-Fast-Lane-Detection-V2) 视频链接:https://www.youtube.com/watch?v=VkvpoHlaMe0 论文链接:https://arxiv.org/abs/2206.07389 代码链接:https://github.com/cfzd/Ultra-Fast-Lane-Detection-v2 现代方法主要将车道检测视为逐像素分割的问题,难以解决效率问题和严重遮挡和极端照明条件等具有挑战性的场景。受人类感知的启发,严重遮挡和极端照明条件下的车道识别主要基于上下文和全局信息。基于这一观察,我们提出了一种新颖、简单但有效的公式,旨在解决超快速度和挑战性场景的问题。具体而言,将车道检测过程视为使用全局特征的anchor驱动顺序分类问题。首先,在一系列混合(行和列)anchor上用稀疏坐标表示车道。在anchor驱动表示的帮助下,将车道检测任务重新表述为一个有序分类问题,以获得车道的坐标。论文的方法可以显著降低anchor-driven表示的计算成本。大量实验表明,论文的方法在速度和精度方面都能达到最先进的性能。轻量级版本甚至可以达到每秒300多帧(FPS)。
打开封面
下载高清视频
观看高清视频
视频下载器
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
2022最新 | HybridNets:端到端感知网络(检测+可行使区域分割+车道线三大任务)
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
什么是端到端自动驾驶?什么是基础world model?
强推!不愧是李飞飞,一口把深度学习、计算机视觉、神经网络、图像处理、图像分割、目标检测、物体识别给讲透了,新手小白秒上手!-人工智能/计算机视觉
直播分享!最新SOTA,多模态3D目标检测新方案(CVPR2023)
最新!特斯拉全自动驾驶算法测试一览!
【WACV 2022】通过扩展自注意力模块实现鲁邦的车道线检测
【组会救星】CVPR 2024 目标检测领域重大突破!
OmniDet:环视鱼眼多任务感知网络(深度估计、视觉里程计、语义和运动分割、目标检测和镜头污染检测)
以特斯拉为案例:自动驾驶仿真框架分析(下,仿真应用/2D检测/3D检测/车道线)
ECCV 2022 Workshop: 自动驾驶视觉感知分享
3D目标检测底层革新被ScartterFormer玩明白了!支持算子定制,实现灵活交互(ECCV2024 )
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
2022最新!伯克利大学现代计算机视觉与深度学习系列课程(2):深度学习介绍1
端到端里程碑任务!UniAD算法详解来啦
从0到1!彻底搞懂BEVFormer算法原理
【collate_fn】Dataloader 的参数 collate_fn 使用的默认函数是什么样 ?什么场景需要我们去自定义 collate_fn 函数呢 ?
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
还在为数据集发愁?!带你了解自动驾驶常见数据集哪里找!
ECCV2022 | 3D目标检难例挖掘首篇工作!(Wamyo出品,改进3D检测中的类内长尾)
使用YOLOv4完成激光雷达点云下的3D目标检测!
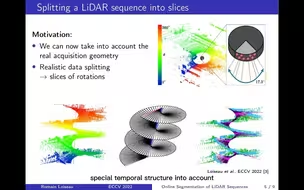
速度超快!激光雷达序列的在线分割:数据集和算法(ECCV2022)
【CVPR2023】 自动驾驶场景下理解BEV目标检测的鲁棒性
一库打尽目标检测对比实验!mmdetection指标转换YOLO指标!
2022最新!伯克利大学现代计算机视觉与深度学习系列课程(3):深度学习介绍2
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
白天图像变夜晚数据SOTA方法| ManiFest:图像翻译新思路!(ECCV2022)
端到端算法是什么?自动驾驶领域是怎么做的?
2022最新!伯克利大学现代计算机视觉与深度学习系列课程(7):深度学习下的目标检测
特斯拉的4D自动标注详解!为什么无标注数据work?
目标检测YOLO系列应用及其算法解读,YOLOv5/v4/v3/v2/v1模型全详解,博导带你3小时快速入门!
量产经验分享:如何提升相机标定的精度?
研一研二如何快速入门目标检测算法!YOLO+RCNN+SSD+FasterRCNN+FastRCNN+Overfeat模型六大深度学习物体检测算法精讲
目标检测YOLO系列就学这两个!目前精度效率最佳的YOLOv5+YOLOv8,计算机大佬保姆式教学环境配置及代码复现!
使用labelme制造自己的语义分割、目标检测数据集,制造标签详细教学
端到端基础!从原始传感器数据到控制策略
EM Planner is all u need?
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)