V
主页
高精地图制作关键技术及领域主流方案分享-part1
发布人
完整视频和课件关注公众号【自动驾驶之心】,后台回复 ‘高精地图’ 获取! 1.高精度地图简介 2.高精度地图生产 3.高精度地图技术制作发展趋势
打开封面
下载高清视频
观看高清视频
视频下载器
在线高精地图与城市NOA是什么关系?为什么如此重要?
在线高精地图 | TopoMLP:驱动拓扑推理的简单而强大的pipeline
自动驾驶汽车是如何在高精地图中建立精确位置的?
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
太详细了!多传感器融合的策略和方法
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
端到端算法是什么?自动驾驶领域是怎么做的?
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
直播分享!最新SOTA,多模态3D目标检测新方案(CVPR2023)
最新!如何使用深度强化学习在未知环境中进行导航?
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
特斯拉的World Model是什么?怎么做端到端训练?
自动驾驶如何学好C++?
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
量产基石!MapTR:在线高精地图经典开山之作
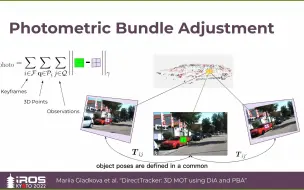
最新3D多目标跟踪方法DirectTracker:基于直接图像对齐和光度学束调整的3D多目标跟踪(IROS2022)
视觉SLAM VIO开源代码解析
特斯拉的4D自动标注详解!为什么无标注数据work?
香港大学最新!ROG-map:高效的以机器人为中心的占用网格地图
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
使用概率深度补全的3D激光雷达重建(IROS2022)
NeurlPS'24开源 | 迈向SLAM/SfM回环新纪元!MSG:关联场景中共视的地点和目标!
看到了这个视频,彻底搞懂了PETR算法!
自动驾驶中的激光雷达点云分割-part2
超详细的激光雷达相机标定教程!(Lidar-Camera)
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
ICRA2022 | 基于图的多传感器融合在自动施工机器人一致定位中的应用
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
实战超详细!Radar、Lidar和前置Camera的标定
多传感器标定的工具箱有哪些?
Nuscenes、KITTI等多个BEV开源数据集介绍!
SLAMesh: 基于Mesh地图的实时LiDAR定位与Mesh建图方法分享
自动驾驶多传感器数据融合(3):单目标跟踪算法
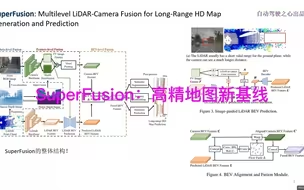
SuperFusion:高精地图新基线
多摄像头多地图视觉惯性定位系统 (VILO):实时精准定位方案