V
主页
京东 11.11 红包
意大利 IIT 研究 —— 移动机械臂严格分层控制中实现任务平稳过渡的分布式处理方法
发布人
会议: IEEE ICRA 2024 | 论文链接: 待定 本文提出了一种分层控制框架,在该框架中,多机器人系统可以依赖分布式处理方法,从而最大限度地降低计算成本,并在分层结构内部的优先级发生变化时,保证任务/约束的平滑和连续转换。该方法在三个任务转换过程中进行了测试,分别针对受限轨迹跟踪、避障和姿势优化等不同任务。测试使用了两个移动机械手,每个机械手有 10 个 DoF,测试结果证实了生成的解决方案的平滑性。 这项工作是在 "RAISE--机器人与人工智能促进社会经济赋权 "项目框架内进行的,并得到了欧盟--NextGenerationEU 的支持。
打开封面
下载高清视频
观看高清视频
视频下载器
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪 3D 打印教程
ETHZ 研究:RL + 基于模型的控制: 利用按需最优控制学习灵活四足运动
COIN-LIO:互补强度增强型激光雷达惯性测距仪(ICRA 2024)
宾大 GRASP 讲座 —— 旧瓶装新酒: 实现机器人学习民主化的结构化方法
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪装配教程
哪怕再顶尖的算法用圆弧拟合出来的直线也干不过真实的单轴直线运动…机器人跑小线段是干不过cnc的…
德国宇航中心(DLR)人形机器人 neoDavid
四足机器人足臂协同 ocs2 qm_control 开源项目学习
意大利 IIT 研究 —— iCub3 阿凡达系统可实现仿人机器人的远程完全沉浸式化身
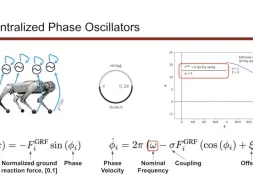
ICRA 2024 - Learning Emergent Gaits with Decentralized Phase Oscillators
斯坦福大学研究 - 用于机械手设计的动力学扩散模型
ETHZ 机器人研究 —— SC-Explorer: 增量式三维场景补全,实现安全高效的勘探制图和规划
ETH + Oxford 四足机器人研究 —— 野外视觉导航的快速可穿越性估计
宾大 GRASP 讲座 —— 机器人中的具身人工智能
控制频率对基于深度 RL 的双足机器人运动扭矩控制器的影响
西北大学机器人讲座 —— 机器人学习的控制原理
Punyo —— 丰田机器人研究所用于全身操作研究的软体机器人
迪士尼研究 —— 鲁棒神经运动控制器的轨迹增强
CMU 机器人讲座 —— Where's RobotGPT
意大利 IIT 人形机器人项目 —— ergoCub
开源 机器人操作数据集 —— DROID: 大规模机器人操作数据集
ICRA 2024 全部论文及下载方式
实时最优控制讲座 —— 最优控制机器人软件
三菱电机研究 —— 自主机器人装配齿轮箱
NYU 机器人研究 —— 用于模型预测控制的顺序二次规划的分阶段实施
慕尼黑工大机器人研究 —— 人工神经假肢控制系统
CMU 机器人讲座 —— 构建适应性强的通用机器人
MIT 机器人讲座 —— 利用对称性提高机器人学习的数据效率
强化学习示例 —— Anymal C
鲁文大学研究 —— 影响分析用于规划机器人机械手的目标非滑动影响
德国宇航中心 —— 医疗机器人技术能力中心
USC 四足机器人研究 —— 基于分层优化的全身控制(机械臂搬运重物)
MIT 机器人讲座 —— MuJoCo MPC (MJPC) 介绍
MIT —— 机器人运动实验室
滑铁卢大学讲座 —— 基于信号时态逻辑的复杂目标多智能体系统运动规划
今天把我做的这个机械臂开源
密歇根大学机器人讲座 —— 动力学和控制学习的一些基本限制
ETH 讲座 —— 机器人的感知和学习:ML 最佳实践项目
六自由度机械臂+模型预测控制MPC+倒立摆+二自由度机械臂
[PongBot-W] Exploring Campus with Wheeled Quadruped Robot