V
主页
MIT 机器人讲座 —— 利用对称性提高机器人学习的数据效率
发布人
转载 标题: 利用对称性提高机器人学习的数据效率 摘要 许多机器人问题的过渡动力学在 SE(2) 和 SE(3) 中与旋转、平移、缩放、反射等是对称的。在这些情况下,任何最优策略也将在这些变换中对称。在本讲座中,我将利用这一洞察力,使用群不变层和等变层将领域对称性直接编码到神经网络模型中,从而提高策略学习的数据效率。其结果是,我们可以用比通常情况少得多的数据来学习非繁琐的视觉运动控制策略。对于模仿学习,这大大减少了所需的演示次数。对于强化学习而言,它减少了学习一个好的策略所需的经验数量。事实上,我们有时可以直接在物理机器人硬件上进行实时训练,从零开始学习良好的策略。 演讲者 罗布-普拉特,东北大学 生平: 罗布-普拉特是美国东北大学库里计算机科学学院的副教授,也是 BDAI 的研究员。他对开发能够在不确定的日常生活中与人类一起执行复杂操作任务的机器人很感兴趣。他的大部分工作都是在机器人政策学习、规划和感知的交叉点上进行的。来东北大学之前,他是麻省理工学院的研究科学家和美国国家航空航天局约翰逊航天中心的技术负责人。
打开封面
下载高清视频
观看高清视频
视频下载器
CMU 机器人讲座 —— 模仿学习(IRL)与从人类反馈中学习(RLHF)
【Actuate 2024】中文字幕|机器人基础模型 - Robotic Foundation Models|Sergey Levine
星尘智能 Astribot S1 x Physical Intelligence π0
UCSD 机器人讲座 —— 人形机器人的关键技术 + 基于模型 VS 学习的控制
西北大学机器人讲座 —— 机器人学习的控制原理
CMU 机器人讲座 —— 构建适应性强的通用机器人
【LeRobot】中文字幕|VQ-BeT:LeRobot Research Presentation 4 by Mahi & jay
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪装配教程
MIT 机器人讲座 —— "SLAM 的过去、现在和未来 | 约翰-霍普金斯保障自主研究所
ETHZ 研究 —— 四足机器人深度柔顺运动控制
机器人讲座 —— 大行为模型 - 基于监督学习的机器人灵巧操作
密歇根大学机器人讲座 —— 机器人学中的高效通用算法
密歇根大学机器人讲座 —— 动力学和控制学习的一些基本限制
实时最优控制讲座 —— 最优控制机器人软件
ETHZ 研究:RL + 基于模型的控制: 利用按需最优控制学习灵活四足运动
CMU 机器人讲座 —— 机器人系统的鲁棒和松弛时态逻辑规划
开源 机器人操作数据集 —— DROID: 大规模机器人操作数据集
TCOptRob 研讨会: 非线性模型预测控制的数值优化
2025顶会热点!三小时带你吃透【具身智能】 ,第二讲——LLMS for robotics
用Isaac Lab和OpenUSD加速机器人学习
斯坦福 AI 讲座 —— 大语言模型(LLM)的涌现能力(Emergent Abilities)是幻觉吗?
IROS 2023 讲座 —— 从基于模型的全身控制到利用 ML 进行足式人形机器人操作
CMU 机器人讲座 —— Where's RobotGPT
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪 3D 打印教程
CppCon 2023 讲座 —— 利用 C++ 和 ROS 实现仿真器、传感器数据和算法
RLBench机器人模仿学习大规模测试框架——任务展示
USC 机器人讲座 —— 提高人机交互的效率和鲁棒性
普林斯顿 IRoM 机器人研究 —— 自信感知: 基于学习的感知为导航提供安全保证(2024 开源)
Dobb·E 一个开源的家庭机器人操作臂端到端学习训练框架
【揭秘】五指灵巧手DexHand021 产线组装的秘密
CoRL 机器人讲座 —— 通向通用机器人之路
UC 伯克利机器人讲座 —— 从状态空间控制到智能机器
实时最优控制讲座 —— 改变接触条件下的轨迹优化
用于控制、推理和学习的随机扩散
MIT 机器人讲座 —— Learning Abstractions from Humans
控制频率对基于深度 RL 的双足机器人运动扭矩控制器的影响
开源人形机器人强化学习训练框架!星动纪元联合清华大学、上海期智研究院发布Humanoid-Gym
USC 2024 机器人基础 第 17 讲 基于采样的运动规划 I
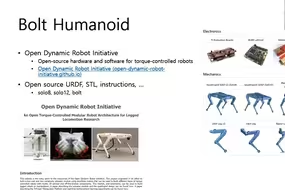
首尔国立大学 BOLT 人形机器人开发的最新进展
UCS 机器人研究 —— 无人机在动态环境中自主避免碰撞的安全感知技术