V
主页
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians
发布人
浙江大学和理想汽车联合出品,实时高质量渲染,用于动态城市场景建模的Street Gaussians,超越所有SOTA! 论文:Street Gaussians for Modeling Dynamic Urban Scenes 链接:https://arxiv.org/pdf/2401.0133 欢迎关注【自动驾驶之心】公众号,干货资讯第一时间到达。 自动驾驶之心官网正式上线了:www.zdjszx.com(海量视频教程等你来学) 1、国内首个基于Transformer的分割检测➕视觉大模型课 2、国内首个大模型与自动驾驶应用论文带读教程 3、世界模型与自动驾驶论文带读课程(视频+答疑) 4、Occupancy从入门到精通全栈课程(理论➕实战) 5、自动驾驶中的多传感器融合与目标跟踪(从入门到精通) 6、国内首个多模态3D目标检测全栈教程(前融合/特征级融合/后融合) 7、YOLOv3~YOLOv8/YOLOX/PPYOLO系列全栈学习教程 8、国内首个BEV感知全栈学习教程(纯视觉+多传感器融合方案) 9、多传感器融合中的毫米波雷达-视觉融合感知全栈教程 10、Lidar+Radar+Camera+IMU离线/在线近20+标定方案教程等你来学 11、模型部署实战:基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速 12、规划控制理论&实战课程:PID、LQR、MPC全掌握 13、国内首个工业级车道线检测课程,从单目2D、单目3D到BEV车道线!!! 14、国内首门面向量产的单目3D与单目BEV感知教程!!! 15、Nerf与自动驾驶论文带读课程!!! 16、轨迹预测理论+实战教程!!! 17、轨迹预测与自动驾驶论文带读课程!!! 18、点云3D目标检测理论与实战教程!!! 19、国内首门毫米波&4D毫米波雷达理论实战教程!!! 课程咨询联系AIDriver004,科研合作及辅导联系AIDriver002。
打开封面
下载高清视频
观看高清视频
视频下载器
3DGS 高斯泼溅 6千万高斯超大场景重建
3D OPGS高质量成果展示三
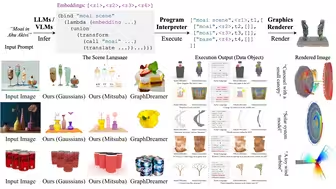
开源 | 场景语言的力量:用程序、单词和嵌入表示 场景,精准描绘3D/4D世界
手持slam设备(灵感源自麦克风)
【成果展示】室外室内实景三维重建、SLAM与精确测量——复杂环境快速勘测与精确三维重建,适用于水电验收,房屋维护、测量取证、数字孪生、建筑保存、复杂地理环境评估
自动驾驶仿真利器!Street Gaussian:基于3D Gaussian Splatting的动态三维街景建模
医学图像三维重建Demo OpenCV Qt VTK CT图像三维重建
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)
自动驾驶中的多传感器融合状态估计如何建模?
[群友工作] DimensionX:港科大、清华、生数推出单图加可控视频扩散模型合成逼真的3D和4D场景方法,在真实世界和合成数据数据集上都取得了大幅度提升
逆天了!NeRF-Casting:逼真重建和渲染高光泽目标
3D OPGS高质量成果展示二
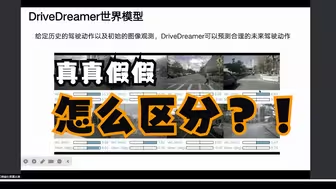
几可乱真!面向真实场景的世界模型居然被用得这么六!
ICCV 2023 | Make it 3D!扩散模型从单个图像生成高保真3D效果
别再用SuGaR了!重磅开源SA-GS:重新定位最新大场景3D重建SOTA(上篇)
上海AI Lab最新!Depth any Video:提升深度估计的一致性以及合成更多真实带有标注的数据
ECCV2024 | 训练45秒,渲染300+FPS!MVSGaussian:高效且可泛化的混合高斯渲染方法
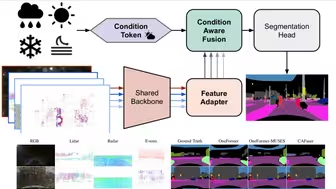
ETH新作CAFuser:条件 感知多模态融合 ,实现对 驾驶场景的稳健语义感知,多个下游任务SOTA!
英伟达最新!NeRF XL:将NeRF分布到多个GPU扩展,对任意大容量的NeRFs进行训练和渲染
端到端基础!绕不开的感知模块
[群友工作] LSM: UTAustin, nVidia在NeurIPS等推出端到端的稀疏无位姿图片输入的三维重建,可实现几何、外观和语义的实时重建效果
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
为自动驾驶构建城市规模的神经辐射场
『汽车人有话说』试驾都要排队的小米,自动驾驶到底行不行
12篇NeurIPS'24|机器学习与数据科学:Lambda、协作世界模型、多域多模态时间序列数据集等
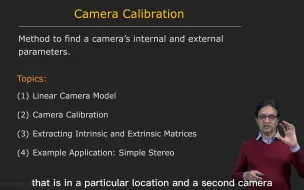
相机标定任务概述 | 哥伦比亚大学相机模型与标定系列课程(1)
打 倒 一 切 反 贼 ! 第一集
CVPR'23 | OCTraN:非结构化交通场景中的3D占用卷积Transformer网络
霍夫曼:认知科学解释眼见并非为实
端到端算法是什么?自动驾驶领域是怎么做的?
特斯拉的World Model是什么?怎么做端到端训练?
World Model!大火的世界模型到底是什么?
【CVPR2023】 自动驾驶场景下理解BEV目标检测的鲁棒性
wargame游戏,挑衅
透明麒麟发射器!!!简单介绍加打靶/幻影科技/软弹枪/发射器/打靶
什么是端到端自动驾驶?什么是基础world model?
香港科技大学!CVPR&NeurIPS2024开源 | 迈向通用可泛化的自动驾驶世界模型(上篇)
目前,最满意的本地知识库 Copilot【总第 128 期】
使用概率深度补全的3D激光雷达重建(IROS2022)
Roblox河北唐县理想自动驾驶