V
主页
英伟达最新!NeRF XL:将NeRF分布到多个GPU扩展,对任意大容量的NeRFs进行训练和渲染
发布人
英伟达最新!NeRF XL:将NeRF分布到多个GPU扩展,论文链接:https://arxiv.org/pdf/2404.16221 我们提出NeRF-XL,这是一种将神经辐射场(NeRFs)分布到多个GPU上的原则性方法,从而实现F。我们首先从回顾现有的多GPU方法开始,这些方法将大型场景分解为多个独立训练的NeRFs,并识别出这些方法中的几个基本问题,这些问题阻碍了随着训练中使用额外的计算资源(GPU)时重建质量的提升。NeRF-XL解决了这些问题,并通过简单地使用更多硬件,实现了具有任意数量参数的NeRFs的训练和渲染。我们方法的核心是一种新颖的分布式训练和渲染公式,它在数学上等同于经典的单GPU情况,并最小化了GPU之间的通信。通过解锁具有任意大参数数量的NeRFs,我们的方法是首个揭示NeRFs的多GPU缩放定律的方法,展示了随着参数数量的增加和GPU数量的增加,重建质量和速度的提升。我们在各种数据集上展示了NeRF-XL的有效性,包括迄今为止最大的开源数据集MatrixCity,该数据集包含覆盖25平方公里城市区域的25.8万张图像。
打开封面
下载高清视频
观看高清视频
视频下载器
英伟达最新!SCube:仅用三张图,就能实现即时大规模三维场景重建
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)
3DGS 高斯泼溅 6千万高斯超大场景重建
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
手持slam设备(灵感源自麦克风)
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
【成果展示】室外室内实景三维重建、SLAM与精确测量——复杂环境快速勘测与精确三维重建,适用于水电验收,房屋维护、测量取证、数字孪生、建筑保存、复杂地理环境评估
基于图像的三维重建
Nerf+SLAM会擦出什么样的火花?
端到端基础!绕不开的感知模块
太强了!RenderOcc:仅使用2D标签和Nerf监督视觉Occupancy
FreeScan Combo 可以重建人体的手持扫描仪
拯救你的CUDA!什么是bank,为什么会发生bank conflict???
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
今年的智驾只有一个声音:端到端+大模型
特斯拉的World Model是什么?怎么做端到端训练?
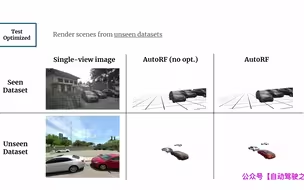
CVPR2022 | AutoRF:从单视角观察中学习3D目标辐射场(nuScenes和KITTI上表现良好)
【黄仁勋】被评选为台湾院士,黄仁勋致辞感谢(台湾省工业技术研究院)
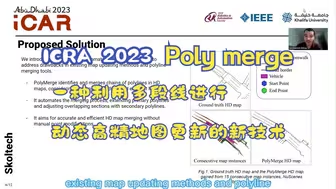
iCAR 2023 | PolyMerge:一种利用多段线进行动态高精地图更新的新技术
自动驾驶仿真大观:聊聊仿真的研究背景
从轿车到SUV | 英伟达通过动态视图合成的不断突破!
【科研宣传】EVA-Gaussian: 3D Gaussian-Based Real-time Human Novel View Synthesis
医学图像三维重建Demo OpenCV Qt VTK CT图像三维重建
端到端模型上车了!GraphAD:国内首个可实车量产部署的端到端建模范式
端到端算法有哪些优势?完爆传统感知规控?
Roblox河北唐县理想自动驾驶
适用任意相机模型!高通提出的BEV分割框架DaF-BEVSeg来了
什么是端到端自动驾驶?什么是基础world model?
25届自驾算法工程师,三段自驾实习,多个30k+offer,为何还要跑路?
牛的!大佬是如何几分钟聊透时空联合规划框架的?
特斯拉FSD自动驾驶,v12.5.6.3,自行车,电瓶车,它会翻车吗?
KTH最新SOTA!大规模回环闭合 | 基于NeRF的稠密SLAM
专注于学习PnC的端到端方法详解
哈工大重新思考鱼眼360重建!MSI-NeRF(WACV 2025)
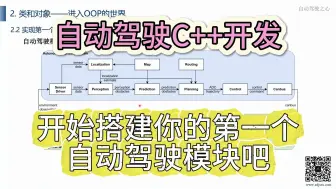
如何从零搭建自己的自动驾驶C++功能模块?
重建大师7.0 无需约束,智能自动补水
BEVPool是什么?实际工程应用中如何加速!!!深度解析