V
主页
为自动驾驶构建城市规模的神经辐射场
发布人
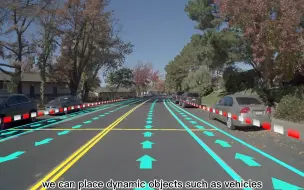
神经渲染的最新进展在使用神经网络更有效、更稳健地表示3D场景方面显示出了巨大的前景。我们正在使用这项技术从真实世界的驾驶数据中自动生成逼真的3D世界和场景。在这里,我们分享了在城市规模上构建神经辐射场(NeRF)管道的经验。https://www.youtube.com/watch?v=8fivoXbT1Ao
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶绕不开的仿真!LightSim:从零开始搭建一个真实、可控、可扩展的自动驾驶仿真平台
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians
特斯拉的World Model是什么?怎么做端到端训练?
什么是端到端自动驾驶?什么是基础world model?
大火的BEVFusion算法详解
Nerf+SLAM会擦出什么样的火花?
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
英伟达最新!NeRF XL:将NeRF分布到多个GPU扩展,对任意大容量的NeRFs进行训练和渲染
在线高精地图与城市NOA是什么关系?为什么如此重要?
GPT-4V与自动驾驶更配?GPT-4V在自动驾驶中的早期探索!
速度快!MobileNeRF:移动端实时渲染方案,Nerf导出Mesh
如何从零搭建自己的自动驾驶C++功能模块?
Nvidia强大的神经重建引擎:场景重建和事件注入(Neural Reconstruction Engine,NRE)
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
端到端算法是什么?自动驾驶领域是怎么做的?
自动驾驶汽车是如何在高精地图中建立精确位置的?
ECCV'24 | JHU提出无需SfM的X光3DGS技术: X-Gaussian,使得X射线新视图合成推理速度提升73倍!
CVPR2023 | 利用神经辐射场提升全景三维场景理解的能力
自动驾驶中的激光雷达点云分割-part2
逆天了!NeRF-Casting:逼真重建和渲染高光泽目标
端到端模型上车了!GraphAD:国内首个可实车量产部署的端到端建模范式
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
以特斯拉为案例:自动驾驶仿真框架分析(上,数据搭建/场景建模)
自动驾驶面试一百问!秋招社招全搞定
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高)
透彻!特斯拉occupancy network详解
高精地图制作关键技术及领域主流方案分享-part1
在线高精地图 | TopoMLP:驱动拓扑推理的简单而强大的pipeline
Corner Case不可怕!自动驾驶Corner Case可控生成系统性解决方案来优化!
自动驾驶如何学好C++?
南洋理工大学博士分享!规模化可学习与交互式的自动驾驶决策系统如何构建?
MetaCam EDU二次开发流程及说明
DRAC Nerf N系列 Shadow Storm 暗影风暴测评
端到端算法有哪些优势?完爆传统感知规控?
CVPR2023 Highlight | Unisim:Nerf+自动驾驶,这不会是魔法吧?
为什么自动驾驶离不开模型部署?
3D高斯泼溅LCC自动化建模厦门园博苑
端到端基础!从原始传感器数据到控制策略