V
主页
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)
发布人
论文链接:https://arxiv.org/abs/2312.13328 项目链接:https://sinoyou.github.io/nelf-pro/ 我们提出了NeLF-Pro,这是一种新颖的表示方法,用于建模和重建在自然场景中变化多样、范围和空间粒度不同的光场。与先前表示整个3D场景的全局快速重建方法不同,我们将场景的光场建模为一组局部光场特征探针,这些探针通过位置和多通道2D特征图进行参数化。我们的核心思想是将场景的光场烘焙成空间上可学习的表示,并通过对相机附近探针的加权混合来查询点特征,从而允许使用mipmap表示和渲染。我们引入了一种新颖的向量-矩阵-矩阵(VMM)分解技术,该技术可以有效地将光场特征探针表示为核心因子(即VM,在局部特征探针之间共享)和基因子(即M)的乘积,有效地编码场景内部的关系和模式。在实验上,我们证明NeLF-Pro显著提高了基于特征网格表示的性能,实现了更好的渲染质量,同时保持了紧凑的建模方式。
打开封面
下载高清视频
观看高清视频
视频下载器
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians
VastGaussian:首个基于3D Gaussian Splatting的大场景高质量重建和实时渲染方法
英伟达最新!NeRF XL:将NeRF分布到多个GPU扩展,对任意大容量的NeRFs进行训练和渲染
ECCV2024 | 训练45秒,渲染300+FPS!MVSGaussian:高效且可泛化的混合高斯渲染方法
英伟达最新!SCube:仅用三张图,就能实现即时大规模三维场景重建
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
三维重建大一统!LSM:无需先验位姿,首次实现实时语义3D重建!
别再用SuGaR了!重磅开源SA-GS:重新定位最新大场景3D重建SOTA(上篇)
CVPR2024最新BEV-Planner:Ego Status对于开环端到端自动驾驶的影响有哪些?
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高)
太强了!RenderOcc:仅使用2D标签和Nerf监督视觉Occupancy
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
基于图像的三维重建
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
CVPR 2024 Highlight 从视频中进行类别无关的交互手和物体三维重建
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
ECCV'24 | FPV-NeRF,Meta的新视图合成方法,为无人机空间感知带来革命性提升
使用概率深度补全的3D激光雷达重建(IROS2022)
世界模型!特斯拉CVPR2023 Workshop!
Nerf+SLAM会擦出什么样的火花?
FreeScan Combo 可以重建人体的手持扫描仪
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
CVPR'23 | OCTraN:非结构化交通场景中的3D占用卷积Transformer网络
【IROS2022】Voxfield:用于在线规划和三维重建的非投影符号距离场
牛津大学CVPR2024 oral | MicKey:特征点检测方法,无需深度测量推断pose!
这可能是最完整的【计算机视觉-三维重建】算法教程了吧!真的通俗易懂!建议收藏!——(人工智能、深度学习、机器学习实战、机器学习算法、Pytorch)
太亮眼!CVPR 2024 自动驾驶方向中稿论文POSTER大全!
用于激光雷达视图合成和三维重建的瞬态神经辐射场
同时优化姿态和占用图!Occupancy-SLAM:基于优化的SLAM方法
几可乱真!面向真实场景的世界模型居然被用得这么六!
【CVPR 2024】鉴智机器人算法大佬揭秘3D场景流估计的最新工作——3DSFlabelling
自动驾驶汽车是如何在高精地图中建立精确位置的?
重磅开源!MARS:基于隐式场的场景感自动驾驶仿真
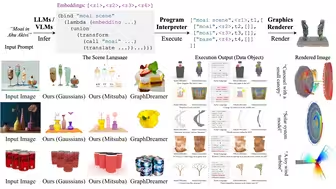
开源 | 场景语言的力量:用程序、单词和嵌入表示 场景,精准描绘3D/4D世界
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
最近有哪些自动驾驶方向的github仓库值得star?
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架
[群友工作] LSM: UTAustin, nVidia在NeurIPS等推出端到端的稀疏无位姿图片输入的三维重建,可实现几何、外观和语义的实时重建效果
定位误差小于20cm!MT F-CVT:增强泊车区域感知
端到端基础!绕不开的感知模块