V
主页
京东 11.11 红包
北京航空航天大学:IROS2021基于交叉线的立体平面SLAM
发布人
https://www.youtube.com/watch?v=3VWF-JJU9T8 现实环境中有丰富的线,面特征,他们能在SLAM中作为比较稳定的路标帮助SLAM提高稳定性和准确性。本文提出了一种从立体图像中提取相交线计算平面参数的新方法。在立体SLAM系统中加入这样的计算平面特征可以有效减小漂移误差,提高系统性能。
打开封面
下载高清视频
观看高清视频
视频下载器
IROS2021,用于自主电力线路检查的无人机系统,直接挂高压电线上自动充电!
高斯抛雪球SLAM
[IROS2021] TUPPer-Map:用于 3D 语义建图的时间和统一全景感知
[IROS2021] 通过触觉感知物体重心,提升机器人抓取稳定性
OA-SLAM:在视觉SLAM中结合物体语义进行相机重定位[ISMAR 2022]
[IROS2021] 使用镜面反射减少机器人视觉系统中的遮挡
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
IROS2022 ETH最新研究:走出羊的步伐
EAO-SLA:集成数据关联的单目半稠密物体级SLAM,代码开源(IROS2020)
上海科技大学:IROS2021 | 事件相机快速动态标定
有了这个算法,你的无人机再也不怕撞鸟了,IROS2021,事件相机+目标检测+轨迹预测!
ICCV 2023|第一种稀疏的仅视觉的交叉视图定位方法!
无人机自主探洞!大规模三维环境中无人机基于图的拓扑探索规划(ICRA2021)
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
IROS2021,REAL:使用无人机对未知路况进行主动闭环的快速探索
南洋理工大学开源F-LOAM:最为精确和快速的开源激光SLAM方案之一
GNSS、IMU、Lidar多传感器因子图融合定位效果展示
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
香港大学火星实验室:无人机利用机载电脑感知计算躲避动态障碍物
港大火星实验室:在大规模杂乱的3D环境中进行快速无人机探索方案
如何学习NeRF/3DGS-SLAM?(公开课直播回放)
SGS-SLAM:神经密集SLAM的语义高斯飞溅
IROS24:BE-SLAM: BEV-Enhanced Dynamic Semantic SLAM with Static Object Reconstruc
IROS2022:无人机自主规划最快线路,赛道时速60km!
如何轻松拿捏LIO-SAM-数学基础篇
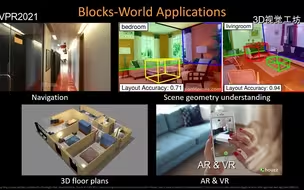
CVPR2021,结构光低计算成本准确恢复分段平面场景
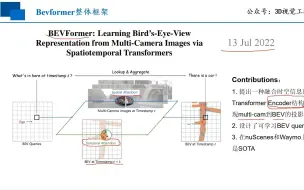
BEVFormer:时空transformer架构
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
基于面结构光的高反射物体重建方法关键技术分享[相位偏折术]
Hovermap,可手持、车载、机载的多平台智能SLAM数据采集系统
(公开课)视觉SLAM原理与ORB-SLAM3系列算法
如何从手持SLAM数据到MESH网格
香港大学工作,FAST-LIO:基于紧密耦合迭代卡尔曼滤波的快速、鲁棒的激光雷达里程计包,代码开源
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM精讲(下)
CVPR2021,基于多视点鱼眼图像的实时球面扫描立体成像
KITTI上准确率第二,具有GPU加速GICP匹配代价因子的全局一致的3D LiDAR映射
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!-上篇
[非完整版]透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM后端优化方法
深度相机概述
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析