V
主页
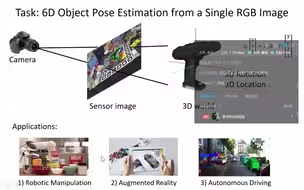
EAO-SLA:集成数据关联的单目半稠密物体级SLAM,代码开源(IROS2020)
发布人
https://www.youtube.com/watch?v=pvwdQoV1KBI 物体级别数据关联和位姿估计在语义SLAM中有重要的作用,至今由于缺少鲁棒和精准的算法还没有解决。本问工作提出一种集成数据关联策略来融合参数和非参数的统计检验,极大地提高数据关联的鲁棒性和精确度。除此之外,还提出了可剔除外点的物体中心点、尺度估计和物体位姿初始化算法的物体位姿估计框架来提高估计的结果。经过在三个公开数据集上测试运行,该方法在精度和鲁棒性上极大地优于现有的方法。具体效果请看视频!
打开封面
下载高清视频
观看高清视频
视频下载器
【精校】AI提示词工程深入探讨| Anthropic官方圆桌 2024.9【中英字幕】
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
动态SLAM最新开源!可插入任意里程计!CAD-Mesher:生成静态、精确的稠密Mesh!
CVPR2024开源NetTrack:跟踪高动态物体!
大作业|激光-视觉-IMU-GPS融合SLAM算法
ORB-SLAM3基本原理与系统架构
[IROS2021] 通过触觉感知物体重心,提升机器人抓取稳定性
绪论|单目相机标定理论及张正友标定法(上篇)
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统!
基于几何信息指导的单目6D物体姿态直接回归算法
IROS2021,REAL:使用无人机对未知路况进行主动闭环的快速探索
[IROS 2024] AS-LIO: 空间交叠度指导的自适应滑窗激光惯性里程计
滑铁卢大学发布! 迈向实时的高斯平滑:通过光度SLAM加速3DGS
Splatam:用于稠密RGB-D SLAM的3D高斯的溅射、跟踪和建图
高斯抛雪球SLAM
Open-Structure:TUM博士最新开源!很适合SLAM消融实验的结构化数据集!
AI大事件:字节跳动全新项目Loopy惊艳登场!AI出题工具他来了!
单目深度估|动态物体处理方法
IROS2022:无人机自主规划最快线路,赛道时速60km!
速度提升10倍以上!Depth Anything V2更稳健、精细的单目深度估计
如何高效学习单目深度估计?
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT 【性能测试——鲁棒性强】“实测”
【Agent2024最新】Agent零基础入门到实战精通,手把手教你搭建企业级Agent智能体,底层原理技术讲解+项目案例解析+附上源码
[ICRA 2024] GCM
GPS信息丢失,利用3D语义信息来精准定位自动驾驶车辆位置,精度达到10m!
CVPR'24 开源|特征匹配新范式:从语义区域到点的匹配框架
如何快速发个AI顶会,博士二年级了还没有好的idea,导师也很水,愁死了?
CVPR'24开源|NeRF-SLAM新SOTA:请任意选择你的高效神经
超级详细的C++方向技术栈
激光slam精度验证,强光环境地面点精度,RTK参数转换大地高转85高,精度验证
单目深度估计|连续帧方法实战课
港科大&南科大 跨平台和环境的统一多传感器SLAM数据集
上海科技大学:IROS2021 | 事件相机快速动态标定
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM传感器基本原理
赛事案例|贵州大学赵梓衡团队基于LIMO开发“基于ROS的双上位机大模型语音交互目标检测SLAM导航室内智能车”项目
[RA-L2021] ,使用紧凑场景表示稀疏SLAM实时稠密建图!
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
NeurlPS 2023 扩散模型对光流和单目深度估计的惊人有效性!
电力巡检,激光slam在电力方面应用,激光雷达应用
微型无人机群SLAM