V
主页
京.东618红包,每天可领3次
陀螺仪结合PID对小车直线行驶进行纠偏
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
差分两轮小车利用PID双速度环跑直线
【开源】PID循迹小车2
mpu6050 控制小车直线行驶,pid算法复位。
陀螺仪闭环 小车走直线转直角弯
陀螺仪还可以这样用?用陀螺仪来动态补偿直线行驶!
闭环走直线的麦伦小车
串级PID~小车直线行驶
为什么小车难以走直线
让机器人走直线,简单吗?
PID寻迹小车
征服陀螺仪第一期,陀螺仪自恢复小车
陀螺仪+pid算法实现底盘朝向固定
加入了pid的遥控小车,起码能走直线了
pid小车
EV3:陀螺仪传感器控制走直线
PID算法 让小车跑出了优美的直线
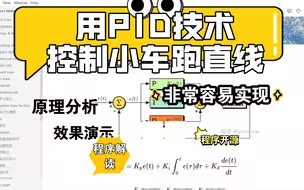
用PID技术控制小车跑直线
传感器控制“物流小车”走直线
[记录]STM32陀螺仪控制小车走直线,90度转弯 初探还不怎么会用,后面尝试一下闭环PID控制,以后用到的地方挺多,希望能用上。
如何让麦克纳姆轮小车走直线
陀螺仪丝滑转向环,可任意角度旋转
从零开始的陀螺仪小车
速度环+位置环串级pid[附源码]
麦轮(陀螺仪+编码器)锁头,矫正
【PID寻迹小车】调参调到吐了,有直线、直角、锐角、圆弧转弯,基于STM32两轮差速小车。
Pid,陀螺仪航向角闭环控制小车如何走直线
物流搬运小车陀螺仪测试路径
加陀螺仪的小车果然直
如何处理电子陀螺仪MPU6050的零点漂移问题
手势控制小车演示基于NRF24L01无线和mpu6050陀螺仪模块
MPU6050陀螺仪加速度模块完整教程✔ 两个案例演示✔ ✔
2020年电赛c题 40度爬坡! 坡道小车msp430f5529 ccs开发 四路寻迹模块 搭载mpu6050陀螺仪 电赛冲冲冲!
基于PID闭环控制的平衡小车
全网首发MPU6050加速度陀螺仪控制4个方向的舵机|附代码
智能平衡车:(11)程序编写:陀螺仪
第十七届智能车摄像头四轮6.21,加入陀螺仪处理环岛
麦轮小车姿态矫正
pid位置环,陀螺仪闭环,旋转90-180度
陀螺仪加速度计MPU6050模块应用!加上卡尔曼滤波果然就不一样。
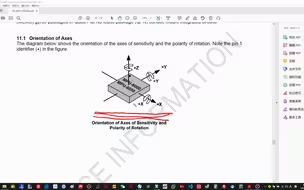
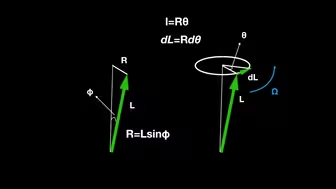
用简单的方式带你秒懂陀螺仪原理