V
主页
陀螺仪闭环 小车走直线转直角弯
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
pid位置环,陀螺仪闭环,旋转90-180度
征服陀螺仪第一期,陀螺仪自恢复小车
mpu6050 控制小车直线行驶,pid算法复位。
为什么小车难以走直线
[记录]STM32陀螺仪控制小车走直线,90度转弯 初探还不怎么会用,后面尝试一下闭环PID控制,以后用到的地方挺多,希望能用上。
简单试了一下角度环
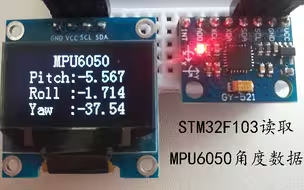
STM32读取MPU6050角度数据
从零开始的陀螺仪小车
闭环走直线的麦伦小车
六轴角度#传感器 模块“控制小车走直线、转弯”
陀螺仪结合PID对小车直线行驶进行纠偏
陀螺仪+pid算法实现底盘朝向固定
5分钟玩转(mpu6050/陀螺仪/GY-521)角度传感器篇,附源码
全网首发MPU6050加速度陀螺仪控制4个方向的舵机|附代码
PID算法 让小车跑出了优美的直线
大学项目千千万,巡线小车占一半
陀螺仪还可以这样用?用陀螺仪来动态补偿直线行驶!
MPU6050+DMP获取姿态解析
陀螺仪加速度计MPU6050模块应用!加上卡尔曼滤波果然就不一样。
智能小车 寻电磁线 入环 拐直角弯 停车 加减速 探测功能 自动探测范围是5cm-4m之间的障碍物 测量障碍物的精度:2cm
麦轮小车姿态矫正
加陀螺仪的小车果然直
智能平衡车:(11)程序编写:陀螺仪
如何让麦克纳姆轮小车走直线
Pid,陀螺仪航向角闭环控制小车如何走直线
MPU6050用法-角度闭环-STM32-17.2-借助MPU6050 PID闭环朝指定方向运动和旋转指定角度
用PID技术控制小车跑直线
MPU6050陀螺仪加速度模块完整教程✔ 两个案例演示✔ ✔
V831+gy521陀螺仪转向+pid,普通模仿送药小车
陀螺仪丝滑转向环,可任意角度旋转
串级PID控制,速度环,转向环,角度环(GY521),巡线〖开源〗
传感器控制“物流小车”走直线
陀螺仪遥控小车
麦克纳姆轮全场定位算法展示
速度环+位置环串级pid[附源码]
寻迹中加入mpu6050转向真的稳。诚恳大佬批评指正。冲冲冲
负压负压,心态调蹦了要。
PID寻迹小车
位置环和速度环闭环,串级pid控制电机
陀螺仪MPU6050内部是如何实现陀螺仪效果的