V
主页
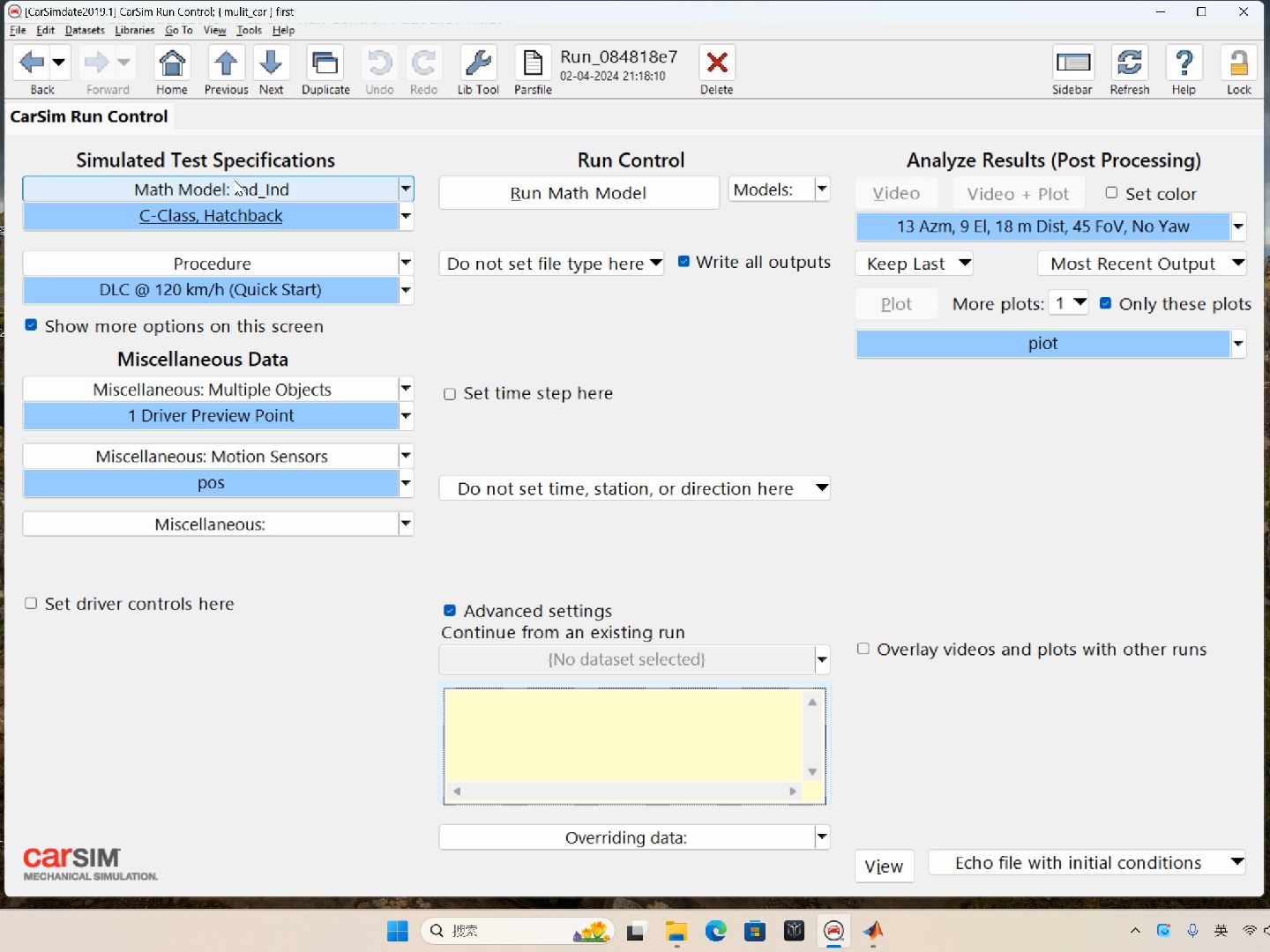
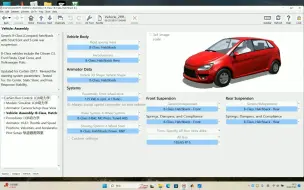
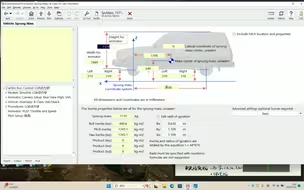
CarSim-Simulink联合仿真多车环境搭建
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
LQR简介与使用
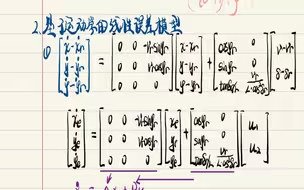
CarSim 中获取动力学相关参数
实践篇-carsim与simulink联合仿真-上线啦
基于LQR控制与运动学模型的路径跟踪
在carsim中添加传感器(位置传感器)
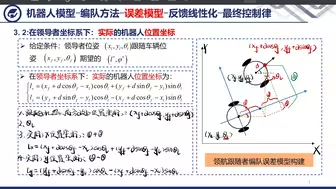
基于反馈线性化控制的机器人编队理论上
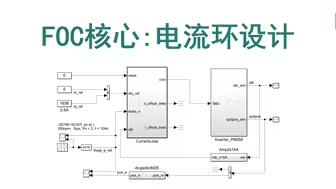
06_多模式FOC控制系统 – 电流环设计
1.基于运动学的MPC路径跟踪-理论篇-离散化
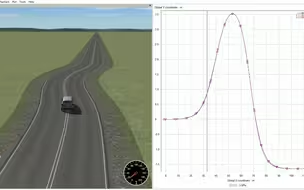
基于LQR路径跟踪仿真效果展示(基于运动学模型)
纯跟踪算法CarSim/Simulink联合仿真
手把手教你搭建MSPM0环境(Keil可移动版)
MPC横纵向控制
VSCode安装配置C/C++教程,c加加开发环境搭建,cpp调试汉化安装使用教程
Stateflow教程 01 快速入门 流程图的使用(上)
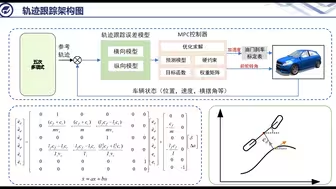
基于MPC轨迹跟踪~理论篇上
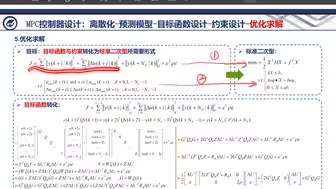
2.基于运动学的MPC路径跟踪-理论篇-预测模型推导
基于运动学的MPC路径跟踪控制
基于反馈线性化控制的机器人编队理论下
C++服务器开发_环境搭建_001
AI环境搭建,详细教程。手把手教你了。AMD显卡+英伟达N卡 环境配置
Windows下C/C++环境搭建(vscode + MinGW-w64)
【web逆向】boss直聘:zp_stoken补环境(参数分析/环境搭建)
如何使用给定的CarSim与Simulink联合仿真资源
纯跟踪算法理论上
纯跟踪算法理论下
ROS仿真-基于反馈线性化控制的机器人编队
基于FMU进行Amesim与Star_CCM 1D&3D联合仿真
6.基于运动学的MPC路径跟踪-理论篇-优化求解下
3.基于运动学的MPC路径跟踪-理论篇-目标函数设计
基于领航跟随的车辆编队
基于车辆动力学与LQR控制的路径跟踪
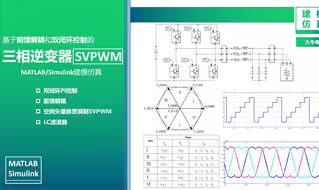
三相逆变器(二) 双闭环控制SVPWM空间矢量脉宽调制前馈解耦MATLAB/Simulink仿真
Stateflow教程 03 快速入门 状态机的使用(上)
4.基于运动学的MPC路径跟踪-理论篇-约束设计
【2024最新鸿蒙5.0开发教程】HarmonyOS 鸿蒙 NEXT开发工具环境搭建&鸿蒙NEXT模拟器
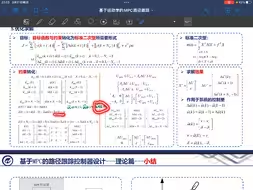
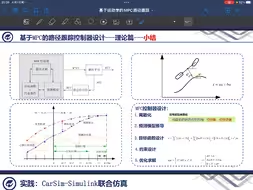
7.基于运动学的MPC路径跟踪-理论篇-小结
【国语】五、UE5环境搭建教程:《使用SpeedTree制作树》 ——Art Station优质UE教程中配搬运
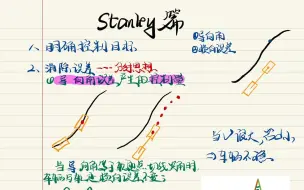
Stanley理论篇
【国语】四、UE5环境搭建教程:《创建平铺纹理和装饰线》 ——Art Station优质UE教程中配搬运
基于MPC轨迹跟踪~理论篇下