V
主页
京东 11.11 红包
基于车辆动力学与LQR控制的路径跟踪
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
纯跟踪算法理论上
1.基于运动学的MPC路径跟踪-理论篇-离散化
基于LQR控制与运动学模型的路径跟踪
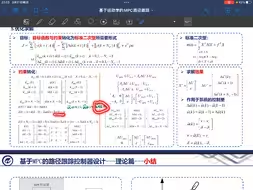
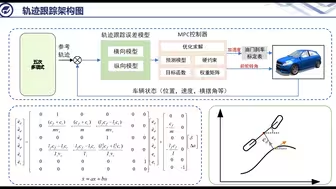
基于运动学的MPC路径跟踪控制
基于MPC轨迹跟踪~理论篇上
2.基于运动学的MPC路径跟踪-理论篇-预测模型推导
基于LQR路径跟踪仿真效果展示(基于运动学模型)
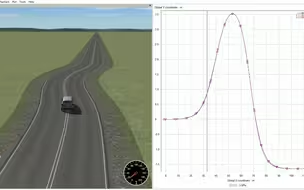
基于车辆动力学模型与LQR控制路径跟踪效果展示
横向基于MPC,纵向基于双PID的轨迹跟踪控制
基于MPC轨迹跟踪~理论篇下
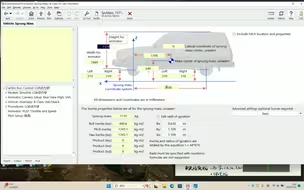
CarSim 中获取动力学相关参数
纯跟踪算法理论下
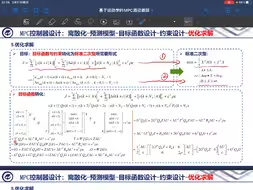
3.基于运动学的MPC路径跟踪-理论篇-目标函数设计
4.基于运动学的MPC路径跟踪-理论篇-约束设计
6.基于运动学的MPC路径跟踪-理论篇-优化求解下
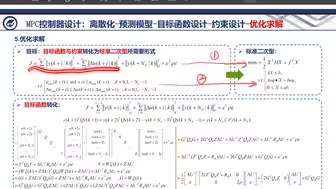
5.基于运动学的MPC路径跟踪-理论篇-优化求解上
纯跟踪算法CarSim/Simulink联合仿真
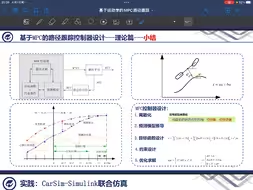
7.基于运动学的MPC路径跟踪-理论篇-小结
纯跟踪算法用于倒车
MPC横纵向控制
CarSim-Simulink联合仿真多车环境搭建
控制18
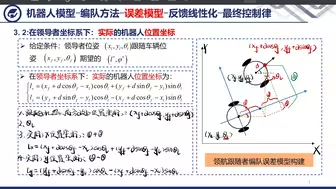
基于领航跟随的车辆编队
基于反馈线性化控制的机器人编队理论上
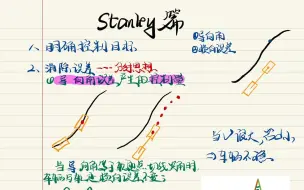
Stanley理论篇
ROS仿真-基于反馈线性化控制的机器人编队
在carsim中添加传感器(位置传感器)
【小时-max】催眠控制001
【论文代码复现125】全网首个支持自定义地图的基于星鸦算法的路径规划算法
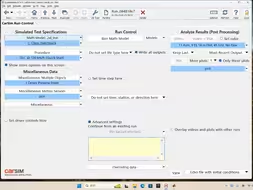
实践篇-carsim与simulink联合仿真-上线啦
基于反馈线性化控制的机器人编队理论下
迷惑控制-迷魂大法操控
基于非线性干扰观测器的六自由度机械臂控制
迷惑控制-光波控制
abaqus粘弹性边界及地震荷载的施加
基于Transformer开源通用动力学模型驱动轮式机器人敏捷控制
女警被操控成为怪物助手
控制美女
2024.10.18 秦虎 教授 华中科技大学 需求可拆分车辆路径优化问题研究
《三轴机械臂运动学与动力学控制》机械臂 | 运动学 | 动力学 | 运动控制【课程试看】