V
主页
18.4M参数,实现SOTA!EFFOcc:一个基于高效融合的三维占用网络的最小基线(清华大学最新)
发布人
论文链接:https://arxiv.org/abs/2406.07042 3D占用率预测(Occ)是自动驾驶领域中迅速兴起且具有挑战性的感知任务,它将驾驶场景表示为具有语义的均匀划分的3D体素网格。与3D目标检测相比,网格感知在识别不规则形状、未知类别或部分遮挡的通用对象方面具有巨大优势。然而,现有的3D占用网络(occnets)计算量大且对标签的依赖性强。在模型复杂性方面,occnets通常由体素级别的重型Conv3D模块或transformer组成。在标签注释要求方面,occnets需要大规模昂贵的密集体素标签进行监督。由过多的网络参数和标签注释要求导致的模型和数据效率低下,严重阻碍了occnets的板载部署。本文提出了一种高效的3D占用网络(EFFOcc),旨在以最小的网络复杂性和标签需求实现最先进的准确性。EFFOcc仅使用简单的2D运算符,并在多个大规模基准测试中提高了Occ的准确性,达到了最先进的水平:Occ3D-nuScenes、Occ3D-Waymo和OpenOccupancy-nuScenes。在Occ3D-nuScenes基准测试中,EFFOcc仅有18.4M参数,并在平均IoU(mIoU)方面达到了50.46,据我们所知,与相关的occnets相比,它是参数最少的occnet。此外,我们提出了一种两阶段主动学习策略,以降低对标记数据的需求。使用6%标记体素训练的主动EFFOcc达到了47.19 mIoU,这是95.7%的全监督性能。所提出的EFFOcc还支持通过区域分解蒸馏改进的仅视觉占用预测。
打开封面
下载高清视频
观看高清视频
视频下载器
ICCV2023 | MPOT:多平面目标跟踪
SuperFusion:高精地图新基线
自动驾驶中的多传感器融合状态估计如何建模?
香港大学最新!ROG-Map:一种基于LiDAR的高效机器人中心占用网格地图
大幅超越SuperGlue!ICCV2023最新端到端特征匹配方法
3D打印预埋隐藏封顶磁铁保姆级教程
鉴定网络热门玩具!3D打印小人怎么样?
ICCV 2023 | NeO 360: 用于户外场景稀疏视图合成的神经场
一招搞定偷你家网络的“蹭网流氓” #蹭网 #网络安全 #涨知识
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
【ECCV2022】SOTA!MeshLoc:基于网格的视觉定位
3d打印机械骰子
【ICCV 2023】RegFormer:点云配准新方案!
自动驾驶多传感器数据融合(1):什么是多传感器融合?
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
3D打印了一根带声光电特效的金箍棒!路上的大人小孩都馋疯了!
2022最新 | HybridNets:端到端感知网络(检测+可行使区域分割+车道线三大任务)
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
端到端算法是什么?自动驾驶领域是怎么做的?
MonoPLFlowNet:用于单目图像的现实尺度 3D 场景流估计(ECCV2022)
ICRA2022 | 基于图的多传感器融合在自动施工机器人一致定位中的应用
BEV-SAN:通过切片注意力网络实现精确的BEV 3D检测
ICCV 2023 | Make it 3D!扩散模型从单个图像生成高保真3D效果
【开源】3d打印一个20方缸背滤
最新,语义分割三十年!基础与前沿进展!
自动驾驶多传感器数据融合(3):单目标跟踪算法
【ICCV 2023】 CORE:协作重建助力多智能体协同感知!
光学神经网络连反向传播都不要了!清华新进展荣登Nature! 物理神经网络发创新的下一个热点
传感器融合教程 Part 2 - 坐标变换(Coordinate Transformations)
普通人如何在3天内,从50元挣到5000元?
Nerf+SLAM会擦出什么样的火花?
香港理工最新 !SLAMesh:激光雷达传感器的SLAM系统,实时构建和利用网格
ZEV款式3d打印开源安装简介(仅适合模立方反吹玩具使用)
还在为数据集发愁?!带你了解自动驾驶常见数据集哪里找!
特斯拉的World Model是什么?怎么做端到端训练?
源码!YOLO v7 + SORT 实现目标检测跟踪(Windows & Linux)
翻车!创想三维V3 plus 3D打印蝙蝠侠头盔,快来嘲笑我的翻车原因
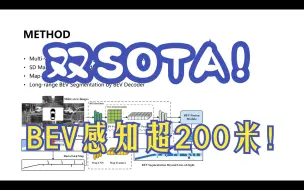
BLOS-BEV:BEV感知超200米!nuScenes和Argoverse双SOTA!
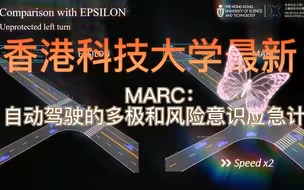
香港科技大学最新!MARC:自动驾驶的多极和风险意识应急计划
自动驾驶仿真利器!Street Gaussian:基于3D Gaussian Splatting的动态三维街景建模