V
主页
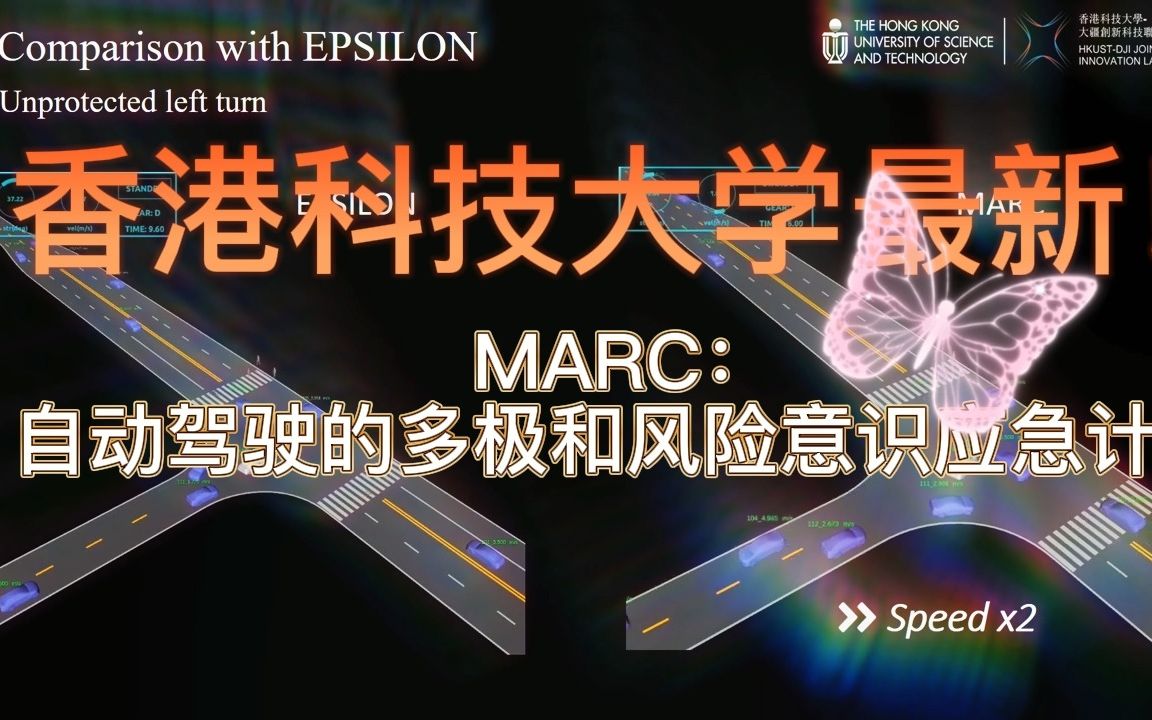
香港科技大学最新!MARC:自动驾驶的多极和风险意识应急计划
发布人
https://www.youtube.com/watch?v=jpJl0vUW7ds&ab_channel=HKUSTAerialRoboticsGroup 论文链接:https://arxiv.org/abs/2308.12021
打开封面
下载高清视频
观看高清视频
视频下载器
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
比赛冠军方案!英伟达最新 | Hydra MDP:端到端多模态规划
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
英伟达最新 | OmniDrive:用于3D感知、推理和规划功能的自动驾驶大语言模型
Waabi最新!UnO:用于感知和预测的SOTA模型(超越监督方式)
牛的!大佬是如何几分钟聊透时空联合规划框架的?
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
轨迹预测到底预测个啥???轨迹预测入门必备!
自动驾驶规划控制的未来是什么?
英伟达最新!NeRF XL:将NeRF分布到多个GPU扩展,对任意大容量的NeRFs进行训练和渲染
透彻!特斯拉occupancy network详解
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
什么是端到端自动驾驶?什么是基础world model?
轨迹预测真正重要的什么?又或者说实际落地的难点在哪里?
Pyramid Diffusion:精细生成3D大场景,自动驾驶高质量数据来了
超详细的激光雷达相机标定教程!(Lidar-Camera)
端到端自动驾驶:SparseDrive 算法详解
【IROS2022】MPC-PF:使用势场的自动驾驶动态目标的社会交互感知轨迹预测
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
世界模型!特斯拉CVPR2023 Workshop!
落地之殇 | 联合预测是端到端正确的道路么?
自动驾驶规控工程师必备技能点!Coupling Trajectory Planning是个啥?
自动驾驶主流的数据集有哪些?详解Argoverse数据集!
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
端到端趋势下,传统规控还有未来么?
渲染速度提高5倍!GaussianOcc:借助3D GS,没有标注也能做Occ(东京大学)
端到端算法是什么?自动驾驶领域是怎么做的?
自动驾驶的规划控制究竟在做什么?我们为什么需要规划控制
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
PLUTO算法详解:端到端首次超越基于规则的方法
同时优化姿态和占用图!Occupancy-SLAM:基于优化的SLAM方法
太强了!RenderOcc:仅使用2D标签和Nerf监督视觉Occupancy
World Model!大火的世界模型到底是什么?
端到端数据格式是什么样的?快来看看吧
EM Planner is all u need?
香港理工大学最新!Slamesh: 使用激光雷达传感器进行实时定位和网格划分
大纲一览 | 规划控制算法都在这里了!PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
自动驾驶中的多传感器融合状态估计如何建模?
ECCV 2022最新 | DynamicDepth:无监督多帧单目深度估计新SOTA!