V
主页
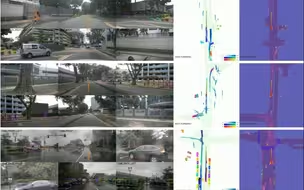
BEV-SAN:通过切片注意力网络实现精确的BEV 3D检测
发布人
本文提出了一种新的方法,称为BEV切片注意力网络(BEV-SAN),以利用不同高度的内在特征。首先沿着高度维度进行采样,以构建全局和局部BEV切片,而不是压平BEV空间。然后,从相机特征中聚合BEV切片的特征,并通过注意力机制进行合并。最后,我们通过transformer融合合并的局部和全局BEV特征,生成最终的特征图。 自动驾驶之心官网正式上线了:www.zdjszx.com(海量视频教程等你来学)
打开封面
下载高清视频
观看高清视频
视频下载器
大火的BEVFusion算法详解
端到端算法是什么?自动驾驶领域是怎么做的?
看到了这个视频,彻底搞懂了PETR算法!
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
美团 | FocusBEV:自标定与时间融合策略提升单目BEV分割性能
视觉3D检测如何做自动标注?
跟知乎大V一起来学BEV!视觉BEV感知和跟踪算法详解
3D目标检测的数据标注/算法讲解/训练调优全系列闭环
毫米波雷达视觉算法CRAFT,这次彻底理解了!
在线高精地图与城市NOA是什么关系?为什么如此重要?
使用YOLOv4完成激光雷达点云下的3D目标检测!
特斯拉的World Model是什么?怎么做端到端训练?
自动驾驶如何学好C++?
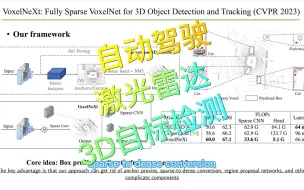
CVPR 2023:VoxelNeXt:用于3D目标检测和跟踪的全稀疏新框架!
面试必备!自动驾驶中BEV常考知识点大串讲
激光雷达3D目标检测算法有哪些?怎么分类的?
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
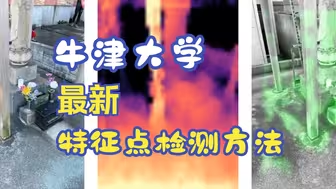
牛津大学CVPR2024 oral | MicKey:特征点检测方法,无需深度测量推断pose!
CVPR2022 | MeMOT:具有记忆的多目标跟踪
世界模型!特斯拉CVPR2023 Workshop!
CVPR2024最新BEV-Planner:Ego Status对于开环端到端自动驾驶的影响有哪些?
【NeurIPS 2023】自动驾驶多模态感知蒸馏新方案来了!
自动驾驶规划控制的未来是什么?
什么是端到端自动驾驶?什么是基础world model?
端到端基础!绕不开的感知模块
自动驾驶汽车是如何在高精地图中建立精确位置的?
太详细了!多传感器融合的策略和方法
自动驾驶假数据效果逆天了!Panacea:如何生成全景可控BEV感知数据?
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
端到端自动驾驶:SparseDrive 算法详解
透彻!特斯拉occupancy network详解
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
83FPS,史上最快 | IA-SSD: 基于point方式的高效激光雷达点云3D目标检测网络(CVPR2022)
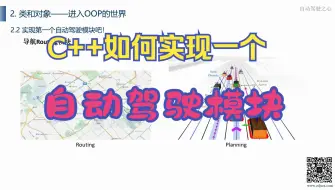
自动驾驶落地离不开的C++!快来实现第一个自动驾驶模块吧
CVPR 2023 | Mask DINO:面向检测和分割的统一Transformer最强框架!
BEVPool是什么?实际工程应用中如何加速!!!深度解析
【WACV 2022】通过扩展自注意力模块实现鲁邦的车道线检测