V
主页
CMU 开源四足机器人运动控制及仿真代码 Quad-SDK
发布人
https://www.youtube.com/watch?v=kSXKjTxKpuA&t=27s Quad-SDK is an open source, ROS-based full stack software framework for agile quadrupedal locomotion. The design of Quad-SDK is focused on the vertical integration of planning, control, estimation, communication, and development tools which enable agile quadrupedal locomotion in simulation and hardware with minimal user changes for multiple platforms. The modular software architecture allows researchers to experiment with their own implementations of different components while leveraging the existing framework. Quad-SDK also offers Gazebo simulation support and a suite of visualization and data-processing tools for rapid development. Refer to the paper for high-level details of the framework. Keywords: Legged Robotics, Quadrupeds, Planning, Control, Leaping, ROS https://www.andrew.cmu.edu/user/amj1/papers/Quad_SDK_ICRA_Abstract.pdf https://www.cmu.edu/me/robomechanicslab/ https://github.com/robomechanics/quad-sdk
打开封面
下载高清视频
观看高清视频
视频下载器
人形机器人足底机械结构设计
仿真人形机器人
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
通过优化理论指导设计双足以达到控制和任务的最优
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
宇树狗儿 新增功能〖跳跃跑〗
[旋转 跳跃 后空翻] 四足/人形机器人的分阶段奖励塑造:一种受约束的多目标 RL 方法 | 开源代码在简介
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
基于分层优化的四足机器人全身运动控制搬运重物
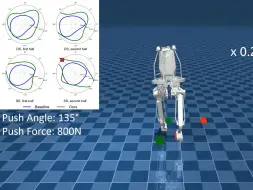
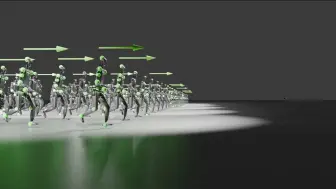
通过对抗运动先验学习四足机器人的双足行走
人形机器人 手指机械结构
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
稚晖君开源人形机器人智元灵犀X1全套资料
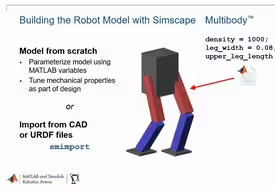
双足机器人的建模与仿真 MATLAB and Simulink
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
沼泽小狗 机器狗 Ghost V60
人形机器人灵巧手臂最新成果
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
MPC and RL, two different roads to legged locomotion, and that's OK
网友搞出世界最小开源端到端人形机器人,极简DIY成本仅2500
右边两足走路也是双足行走
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
人形机器人腿部机械结构设计 !很简单,有手就行!论文在简介
[搬] 稳健的类人机器人行走-通过强化学习增强基于模型的控制
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
今天把我做的这个机械臂开源
AI新作|英伟达:人形机器人!全身控制模式无缝转换
Combining Learning-Based Locomotion with Model-Based Manipulation for Legged
达妙轮腿太空步!妙啊!
这下真狗了 Boston Dynamics
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers
上电驱?波士顿动力Atlas向液压说再见?不会再爱了!
适用于人形和四足的仿真器 The Simple Simulator 最新成果 去简介github 地址试用下吧
左手一只鸡,右手一只鸭,智能机器人去你家
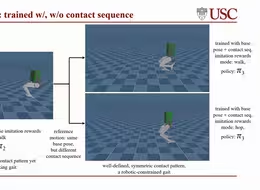
基于学习的多模式双足运动和隐式转换:一种多功能的策略方法
强化学习,启动!
Online trajectory optimization for dynamic aerial motions of a quadruped robot
腿式机器人的多接触惯性估计与定位 [论文在审稿中]