V
主页
人形机器人灵巧手臂最新成果
发布人
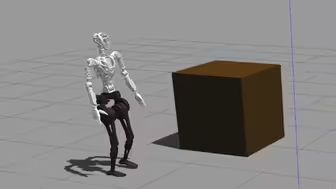
https://www.youtube.com/watch?v=MEJfTm_wjOk MOMO has learned the Bam Yang Gang dance moves with its hand dexterity :) By analyzing 2D dance videos, we extract detailed hand skeleton data, allowing us to recreate the moves in 3D using a hand model. With this information, MOMO replicates the dance motions with its arm and hand joints. RILAB and KIMLAB have been collaborating on research related to robot motion retargeting, which encompasses hand motions. Please stay tuned for additional research results from both labs. - RILAB (Robot Intelligence Lab, Prof. Sungjoon Choi's lab at Korea University) https://sites.google.com/view/sungjoon-choi/home
打开封面
下载高清视频
观看高清视频
视频下载器
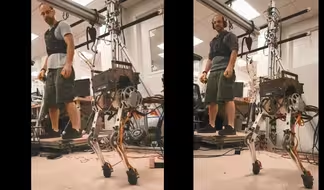
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
MPC and RL, two different roads to legged locomotion, and that's OK
可以使用镊子 夹芯片的 机器手 | ILDA灵巧手 #人形机器人
EAGLE: The First Event Camera Dataset Gathered by an Agile Quadruped Robot
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
【通用】人形机器人RL策略Gazebo二次仿真框架
人形机器人腿部机械结构设计 !很简单,有手就行!论文在简介
基于学习的多模式双足运动和隐式转换:一种多功能的策略方法
有开源github代码! RA-L论文 人形机器人的多接触全身控制
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
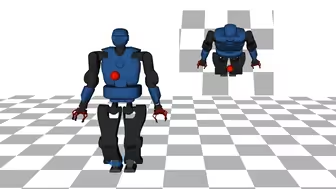
(RA-L 24)Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Humanoid
Humanoid robot research result highlights in 2022- CNRS-AIST JRL
Learning whole-body manipulation for quadrupedal robot
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
SpotMini nimble robot by Boston Dynamics
Deep Compliant Control for Legged Robots
电流可达210A微型直流驱动器,最高可达300A,用于军工,转台,机器人#机器人 #驱动器 #仿人机器人
solving the walking robot problem with reinforcement learning
Inverse-Dynamics MPC via Nullspace Resolution (IROS'23 Presentation)
Model and data, two essential ingredients for controlling legged robot
SCIENCE ROBOTICS: Dynamic locomotion synchronization via bilateral tele
A Feasibility-Driven Approach to Control-Limited DDP
呐,这就叫优雅!这就叫专业! Boston Dynamic Spot
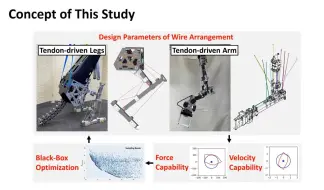
(RA-L 2024) Design Optimization of Wire Arrangement for Tendon-driven Robots
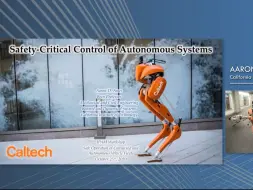
Safety-Critical Control of Autonomous Systems -Aaron Ames
简简单单打个螺丝!Nextage:用于精细操作的人形机器人
NASA’s first humanoid robot Valkyrie is being tested in Australia
Spot 自主乘坐电梯和开门
人形机器人 手指机械结构
DreamWaQ: legged robot walks in harsh environments with its imagination P1
DTC: Deep Tracking Control 1
Topology-Based MPC for Automatic Footstep Placement and Contact Surface Selectio
Vision-Based Terrain-Aware Locomotion for Legged Robots ---T-RO