V
主页
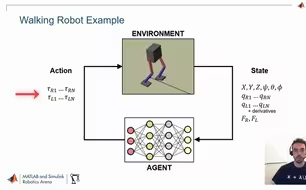
Control is dead ?control+ learning才是未来
发布人
control is dead ? control+ learning 才是未来
打开封面
下载高清视频
观看高清视频
视频下载器
这也能赶超PID控制?模型预测控制书籍推荐:Advanced Model Predictive Control 含代码
人形机器人 手指机械结构
【通用】人形机器人RL策略Gazebo二次仿真框架
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
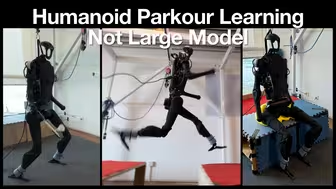
我们的人形机器人不愿意使用大模型去思考。但是它很爱玩耍。[humanoid parkour learning]
哥们还中了一篇CVPR2024——多模态时代让卷积网络再次伟大!
写了一个人形机器人仿真,适用5或者6自由度的腿形
(ICRA 2024) Actor-Critic Model Predictive Control
博士论文答辩 - Alexander Schperberg - 统一基于模型的优化和机器学习
通过优化理论指导设计双足以达到控制和任务的最优
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
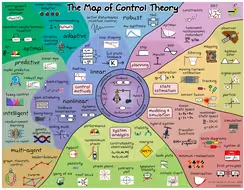
控制理论学习路线图
CMU 开源四足机器人运动控制及仿真代码 Quad-SDK
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
双足机器人步态生成 MATLAB and Simulink
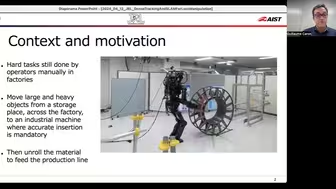
ICRA 24 | Sim-To-Real Learning for Humanoid Box Loco-Manipulation
真牛!这个人形机器人吊打很多厂家的“产品”
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
Deep Compliant Control for Legged Robots
Bipedal Safe Navigation over Uncertain Rough Terrain
ANYmal在金属、采矿厂进行机器人自主巡检
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
Humanoid Loco-Manipulations ... 3D Tracking and SLAM with Wide-Angle Depth-Image
UCL 论文 DiPPeST:基于扩散的路径规划器,用于四足机器人的轨迹合成
(Humanoids 2023) Learning Safer Footstep Planning Policies for Legged Robots
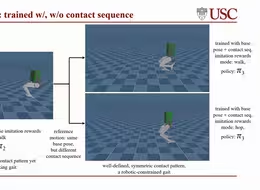
基于学习的多模式双足运动和隐式转换:一种多功能的策略方法
这下真狗了 Boston Dynamics
A Feasibility-Driven Approach to Control-Limited DDP
波士顿动力也上强化学习了,很强!Reinforcement Learning with Spot _ Boston Dynamics
EAGLE: The First Event Camera Dataset Gathered by an Agile Quadruped Robot
双足机器人的深度强化学习- MATLAB and Simulink
(RA-L 24)Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Humanoid
电流可达210A微型直流驱动器,最高可达300A,用于军工,转台,机器人#机器人 #驱动器 #仿人机器人
我们把机器人拉出门散了个步,还是原来的模型,没有新训练 [Humanoid Parkour Learning]
2024全球十大人形机器人:中国机器人强势崛起!
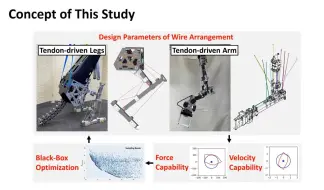
(RA-L 2024) Design Optimization of Wire Arrangement for Tendon-driven Robots
适用于人形和四足的仿真器 The Simple Simulator 最新成果 去简介github 地址试用下吧
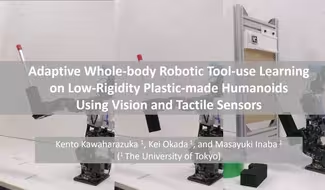
ICRA 24 Adaptive Whole-body Robotic Tool-use Learning on Low-rigidity Humanoids