V
主页
rtabmap RGBD数据初探(立下flag,好好研究rtabmap 和dso代码,转战定位)
发布人
一直从事三维重建工作,在3D视觉工坊也开讲了SfM方面的知识, 但是因为公司项目,离线的定位定姿不满足项目需求,虽然SfM还有 些工作没做,但是准备开始着手RTAB-Map 和DSO!
打开封面
下载高清视频
观看高清视频
视频下载器
Web SLAM 初探
(补充)全景实时稠密slam 、全景sfm+mvs、全景sfm+gs结果对比
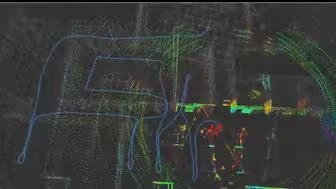
纯视觉无需任何传感器,只靠视觉本身已有的信息来约束bundle adjustment,大大减小drift,定位定姿效果堪称完美!!!!!!!!!!!
8月23日组会:RGBD GS-ICP SLAM
视觉三维重建,colmap重要代码逐行解析!
大疆livox-mid360定位
"实时" 双目三维重建(原生RTAB-map和RTAB-map与colmap的结合版)
视觉SLAM算法特征点法详解
[IROS 2024] AS-LIO: 空间交叠度指导的自适应滑窗激光惯性里程计
structure from motion(融合gps)中观测值尺度信息定权的bundle adjustment !,绝对误差小于10cm,结果逼近gps位置
改进版本colmap+openmvs 完成视觉实景三维重建
【3D数学】欧拉角万向节死锁与插值
套件教程-RTABMap之3D雷达定位与导航
(转自youtobe,突然想到这个思路可以在我sfm中复现)CCTag 和 ARToolkitPlus对比
大疆livox-mid360室外定位
[ICRA 2024] GCM
阿木SU17在无GPS弱光环境下依靠四目SLAM定位飞行展示
你了解AR吗?快来构建自己的AR场景吧
SLAM与三维重建的区别
【SLAM】【VIO】双目视觉 +超强大的三维感知力 VIOBOT 【性能测试——鲁棒性强】“实测”
套件课程--LIO-SAM的介绍和使用
基于mesh 的视觉重定位(第一趴)
IGE-LIO:充分利用强度信息克服激光退化场景下的定位精度
【SLAM】【VIO】双目视觉+超强三维感知力【室内复杂空间内——同步定位.建图.导航】“实测”
存档毕设
多相机重建-还记得小区旁边的小路吗
全景影像的gaussian splatting :全景sfm+高斯溅射
多模态数据(深度)融合colmap 代码实现讲解
微型无人机群SLAM
套件教程-FAST LIO2之点云建图
一种解耦非线性优化的高效VI-SLAM系统-Snake-SLAM 效果测试
Luma.ai你用了吗?对于车载数据Luma.ai又能处理多大场景?
【SLAM】【VIO】双目视觉+超强三维感知力【功能演示——半稠密点云】“实测”
【SLAM-2024】第五届全国SLAM技术论坛-浙江大学-高飞-自主飞行集群的感知与定位
colmap 实现融合gps (原视频update)
CU-Astro自主探索无人机室内外飞行演示:3.5寸紧凑型 (cuhk-usr-group)
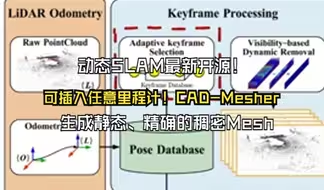
动态SLAM最新开源!可插入任意里程计!CAD-Mesher:生成静态、精确的稠密Mesh!
赛事案例|贵州大学赵梓衡团队基于LIMO开发“基于ROS的双上位机大模型语音交互目标检测SLAM导航室内智能车”项目
2024年了,传统sfm还能做什么?
强推!【SLAM核心算法】中科院博士一口气带你学完无人驾驶:原理、激光、无人机、VR、传感器、计算机视觉!(人工智能、深度学习、机器学习、神经网络、图像处理)