V
主页
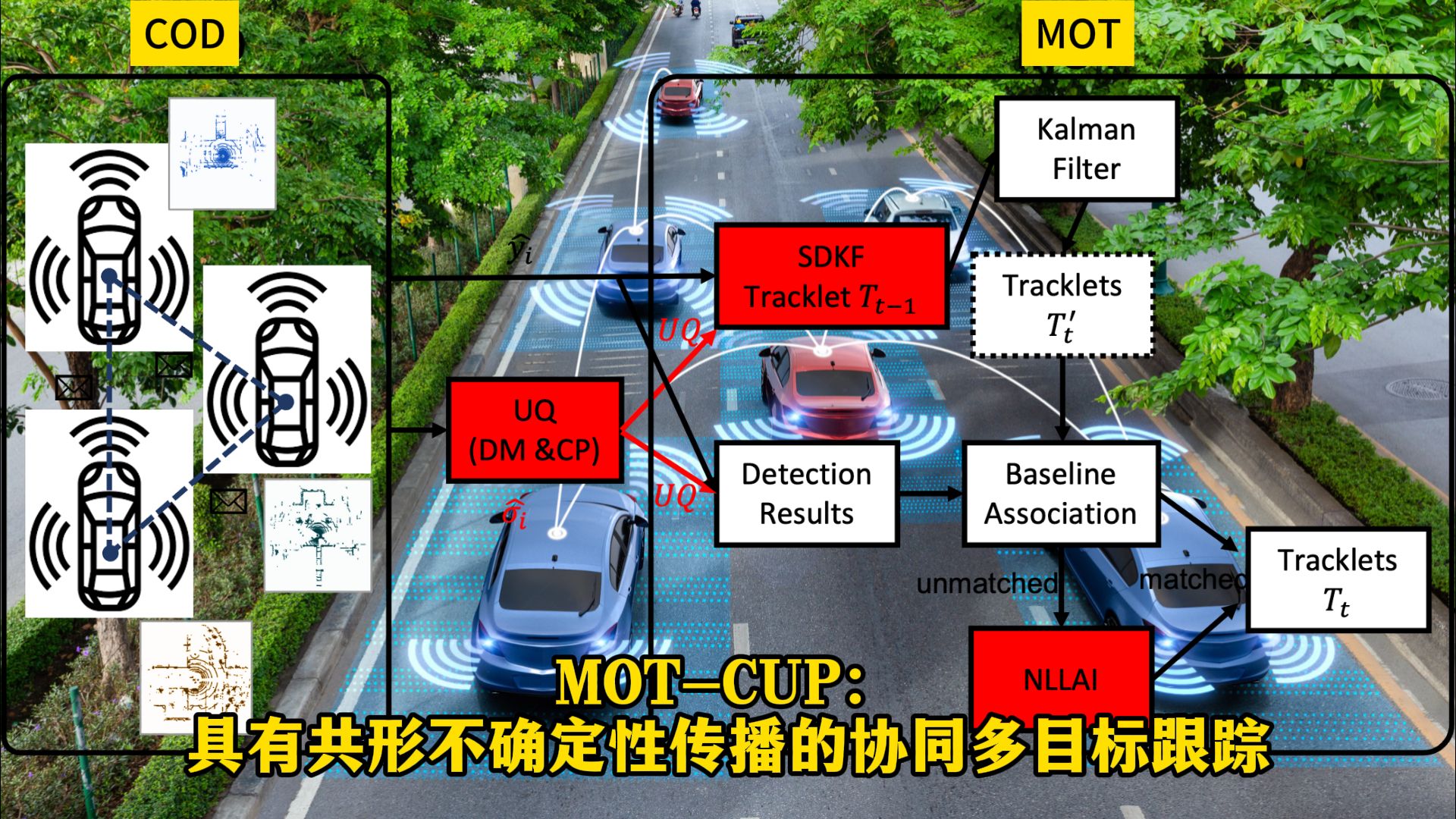
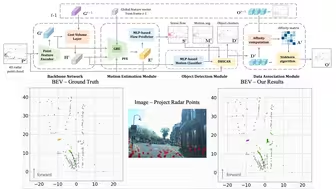
MOT-CUP: 具有共形不确定性传播的 协同多目标跟踪,利用来自COD的不确定性量化以增强MOT性能
发布人
为解决如何利用来自COD的不确定性量化以增强MOT性能。来自康涅狄格大学和纽约大学的研究团队首次尝试设计了不确定性传播框架,该框架称为MOT-CUP。该团队的框架首先通过直接建模和符合预测来量化COD的不确定性,并在运动预测和关联步骤中传播这一不确定性信息。
打开封面
下载高清视频
观看高清视频
视频下载器
MAVIS:使用基于SE2(3)的精确IMU预积分的多摄像头增强视觉惯性SLAM,该研究成果已被icra2024接受。
超越BEVFusion!DifFUSER:扩散模型杀入自动驾驶多任务(BEV分割+检测双SOTA)
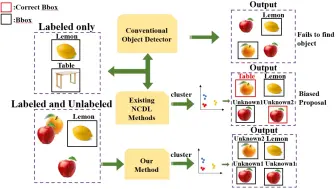
解决目标检测器忽略不可见的目标问题;AAAI 2024 | 清华大学DRM:通过去偏技术增强新类别发现与定位
《智能网联汽车》暑期实训研学营精彩回顾
上海交大邹丹平团队的最新开源力作,Ground-Fusion:一种对极端情况具有鲁棒性的低成本地面 SLAM 系统。
闭环 SOTA | 首个基于MLLM的自动驾驶规划系统,性能高,Token少!
CVPR 2024 | LiDAR Diffusion 首个可以根据多模态条件生成逼真 的激光雷达场景方法,加速107倍
35年首次证明!神经网络登上Nature:神经网络具有人类泛化能力,是人工智能的又一重大突破!
ECCV'2024 北航、极氪领衔 | FSD-BEV:大幅度提升基于视觉的3D目标检测算法性能,实现感知新SOTA!
CenterNet+ deepsort多目标跟踪!提高检测精度和速度!
【神经网络杀疯了!】登上了nature神坛!迎来人工智能新的里程碑:被证明具有泛化能力,能像人类一样思考!
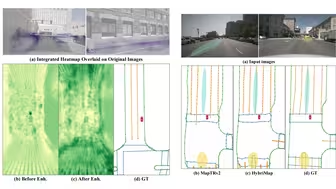
HybriMap:结合PV和BEV特征的高清地图构建技术,实现nuScenes数据集性能提升4%
CVPR2024 | 一统所有目标感知任务,华科&字节提出感知模型GLEE,一次性解决图像和视频中的几乎所有目标感知任务
【从放弃到精通】目标追踪—计算机博士精讲卡尔曼滤波算法教程卡尔曼滤波从理论到实践深度学习_计算机视觉_物体检测_目标跟踪_AI
神经网络杀疯了!登上nature神坛!35年来首次被证明具有系统泛化能力,能像人类一样举一反三!未来是AI的未来!
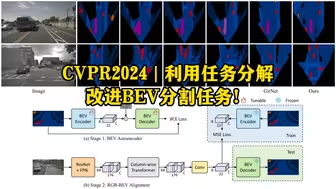
CVPR2024 | 利用任务分解改进BEV分割任务!
来自民间的30项关于特斯拉FSD v12版本 以上的实测,带你深度感受端到端 自动驾驶技术线路的优缺点
脑控慢性sha人噪音害人集锦
重磅出炉!高翔《自动驾驶与机器人中的SLAM技术》新书配套课程发布
自动驾驶规划控制概况
ICRA'2024 | 最新开源!RaTrack4D:使用4D雷达点云进行移动物体检测和跟踪
人工智能小知识:深度学习模型压缩技术—大白话详解模型剪枝
SIGGRAPH'24 | 逆天!利用分层3D高斯表示,实时渲染超大规模场景!
ICRA'24 | RGBManip:仅基于单目RGB相机的机器人自主环境感知和操纵,实现精准环境感知
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
YOLOV8+deepsort多目标跟踪实战-手敲python代码实战,含区域检测、目标检测、计数、目标跟踪、opencv、计算机视觉
3D Gaussian Splatting在自动驾驶中的应用——建模动态城市场景
使用 YOLOv8+改进 PSMNet 立体匹配,实现目标检测与测距
【免费公开课】语义信息增强的激光雷达SLAM
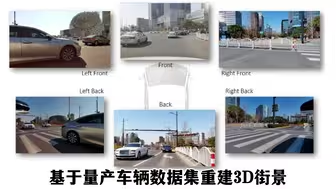
T-ITS | 秦通团队 Crowd-Sourced NeRF: 基于量产车辆数据集重建3D街景
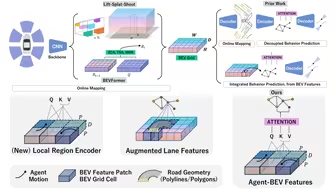
ECCV'24 | "突破传统",通过直接BEV特征注意力加速在线建图和行为预测
深夜炸弹!OpenAI发布o1模型,AI第一次像人类一样思考…
几乎支持目前所有主流框架的自动“炼丹炉”!可以说至目前最好的自动调参工具!
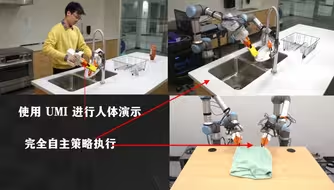
斯坦福大学提出了通用操纵界面(UMI)一种数据收集和策略学习框架,可将人类演示的技能直接转移到可部署的机器人策略中。
如何写出一篇学术论文,从构思到发刊教程
ECCV'24 开源 | 6DGS 又快又好,无需迭代的 单图像6D物体位姿估计
CVPR 2024 | 进一步加速落地:压缩自动驾驶端到端运动规划模型,PlanKD:一种为压缩端到端运动规划器量身定制的知识蒸馏方法
算法岗的招聘现状与未来——移动机器人与自动驾驶专场
高翔SLAM报告:开阔高动态区域的激光融合定位
10大与人工智能相关的<顶级会议>,哪些是你的投递首选?这些顶会论文与SCI论文相比如何呢?