V
主页
L4自动驾驶感知的终极形态会是协同感知吗?UCLA顶级博士告诉你答案!
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
超详细!BEV感知算法的应用介绍
什么是端到端自动驾驶?什么是基础world model?
相关2D和3D感知基础知识
太详细了!多传感器融合的策略和方法
国内首门自动驾驶轨迹预测课程讲了哪些内容?
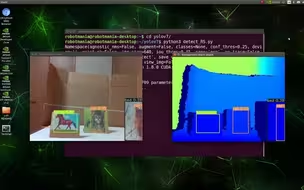
源码实战!使用RealSense和Jetson Nano完成YOLOv7部署
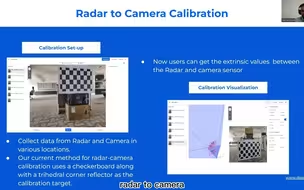
史上最全 | 自动驾驶中的多传感器标定校准(Lidra/Radar/Camera/Stereo/IMU等)
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
透彻!特斯拉occupancy network详解
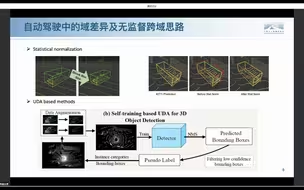
内卷时代如何降低自动驾驶数据的标注成本?双域主动学习可能是答案!
CVPR2023 | 利用多样性3D感知数据!3DTrans解决当前感知任务局限性part1
特斯拉的4D自动标注详解!为什么无标注数据work?
ECCV2022 | ViT到底有多少种玩儿法?ViT-V2X:协同感知与ViT的首次碰撞会有怎样的火花?
以特斯拉为案例:自动驾驶仿真框架分析(上,数据搭建/场景建模)
【全122集】冒死上传!CNN、RNN、GAN、GNN、DQN、Transformer、LSTM等八大深度学习神经网络一口气全部学完!
大纲一览 | 规划控制算法都在这里了!PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
超全超简单!入门到进阶一口气学完CNN、RNN、GAN、GNN、DQN、Transformer、LSTM等七大深度学习神经网络算法!真的比啃书好太多!
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架
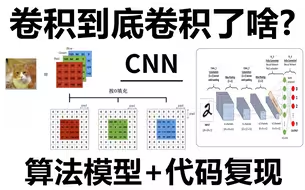
卷积到底卷积了啥玩意?今天终于搞懂了!手撕CNN卷积神经网络,全面解析,入门到进阶,通俗易懂,草履虫都能学会!机器学习|深度学习|计算机视觉|人工智能
从0到1!彻底搞懂BEVFormer算法原理
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
【ICCV 2023】 CORE:协作重建助力多智能体协同感知!
ICRA 2023 | 直接激光雷达惯性里程计:具有连续时间运动校正功能的轻量级LIO(UCLA最新)
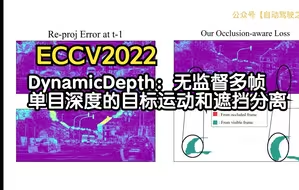
ECCV2022 | DynamicDepth:无监督多帧单目深度的目标运动和遮挡分离
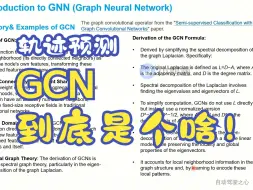
轨迹预测的GCN是个啥???大佬详解GCN理论&代码
自动驾驶多传感器数据融合(3):单目标跟踪算法
[CVPR24 Vision Foundation Models Tutorial] Vision in LMMs by Jianwei Yang
不愧是GitHub大佬!半天就教会了我YOLO、SSD、FasterRCNN、FastRCNN、SPPNet、RCNN等六大目标检测算法!深度学习/体检测
端到端趋势下,传统规控还有未来么?
大火的BEVFusion算法详解
端到端模型上车了!GraphAD:国内首个可实车量产部署的端到端建模范式
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
自动驾驶主流的数据集有哪些?详解Argoverse数据集!
端到端自动驾驶离我们还有多远?Think Twice:CVPR 2023闭环新SOTA!
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
OpenCV入门到进阶!一口气学完图像处理、目标检测、物体识别、图像分割、三维重建、医学影像!存下吧,真的比啃书好多了!(机器学习/深度学习/计算机视觉)
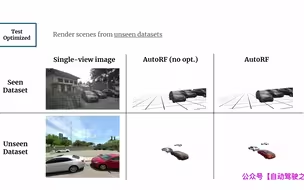
CVPR2022 | AutoRF:从单视角观察中学习3D目标辐射场(nuScenes和KITTI上表现良好)