V
主页
端到端自动驾驶离我们还有多远?Think Twice:CVPR 2023闭环新SOTA!
发布人
关注公众号【自动驾驶之心】,后台回复【端到端】获取更多资料!
打开封面
下载高清视频
观看高清视频
视频下载器
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
端到端算法是什么?自动驾驶领域是怎么做的?
校招和社招转行人必看!2023年如何入局自动驾驶?
面向下一代自动驾驶:全栈里程碑综述汇总
来听大牛说!赵行老师在CVPR 2023年自动驾驶研讨会上发表的演讲
端到端数据格式是什么样的?快来看看吧
端到端算法有哪些优势?完爆传统感知规控?
ICLR'24无图新思路!LaneSegNet:基于车道分段感知的地图学习(实时推理+三项SOTA)
端到端基础!绕不开的感知模块
多目标跟踪世界冠军和大家一起聊聊MOT的模块与优化方向!
CVPR 2023 | 协同感知在真实世界就不能打了?V2V4Real告诉你很能打!世界首款V2V协同感知数据集
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
2023年自动驾驶行业会升温吗?
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
CVPR 2023 面向自动驾驶场景的纯视觉三维语义占有预测
讲明白了!端到端算法评估指标详解
端到端趋势下,传统规控还有未来么?
冠军分享!QCNeXt:面向下一代多智能体联合轨迹预测新框架(CVPRW2023)
ETH最新!CVPR2024 | GoMVS:多视图几何重建新SOTA
冠军!英伟达荣获CVPR端到端自动驾驶挑战赛第一名
地平线VAD又又又上新了!VADv2比v1强在哪里?一起来听
ITSC2023 | LimSim:长期可交互多场景交通仿真器
轨迹预测真正重要的什么?又或者说实际落地的难点在哪里?
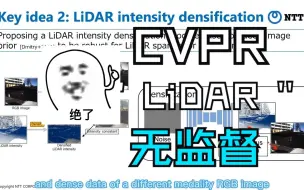
CVPR 2023 | 使用LiDAR强度的无监督内在图像分解
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
自动驾驶规控工程师必备技能点!Coupling Trajectory Planning是个啥?
自动驾驶主流的数据集有哪些?详解Argoverse数据集!
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)
太亮眼!CVPR 2024 自动驾驶方向中稿论文POSTER大全!
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
CVPR2023 Nuplan自动驾驶轨迹规划比赛第二名方案详解
【NeurIPS 2023】自动驾驶多模态感知蒸馏新方案来了!
自动驾驶规划控制的未来是什么?
轨迹预测到底预测个啥???轨迹预测入门必备!
从0到1!彻底搞懂BEVFormer算法原理
大模型时代下的端到端自动驾驶(上篇)
如何快速完成顶会论文,计算机专业论文全面讲解,让你在最短的时间能完成自己的论文!零基础小白也能一气呵成的发表论文!-人工智能、计算机、SCI论文、CVPR论文
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
【CVPR2023】 自动驾驶场景下理解BEV目标检测的鲁棒性
重磅开源!MARS:基于隐式场的场景感自动驾驶仿真