V
主页
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
发布人
DriveEnv NeRF框架利用神经辐射场(NeRF)能够在有针对性的现实世界场景中验证和预测自动驾驶agent的功效。标准的基于模拟器的渲染往往无法准确反映真实世界的性能,这是由于模拟到真实世界的差距,这代表了虚拟模拟和真实世界条件之间的差异。为了缩小这一差距,论文提出了一种使用NeRF构建目标真实世界场景高保真度模拟环境的工作流程。这种方法能够从新颖的视点渲染逼真的图像,并构建用于模拟碰撞的3D网格。与使用标准模拟器渲染pipeline完全训练的agent相比,这种方法增强了代理的鲁棒性,并在部署到目标真实场景时减少了性能下降。 论文链接:https://arxiv.org/pdf/2403.15791.pdf 项目链接:https://github.com/muyishen2040/DriveEnvNeRF
打开封面
下载高清视频
观看高清视频
视频下载器
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
逆天了!NeRF-Casting:逼真重建和渲染高光泽目标
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians
VastGaussian:首个基于3D Gaussian Splatting的大场景高质量重建和实时渲染方法
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
什么是端到端自动驾驶?什么是基础world model?
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)
端到端数据格式是什么样的?快来看看吧
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
英伟达最新!NeRF XL:将NeRF分布到多个GPU扩展,对任意大容量的NeRFs进行训练和渲染
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
为自动驾驶构建城市规模的神经辐射场
英伟达冠军方案!Hydra-MDP:多模态端到端自动驾驶详解
ITSC2023 | LimSim:长期可交互多场景交通仿真器
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
讲明白了!端到端算法评估指标详解
使用概率深度补全的3D激光雷达重建(IROS2022)
麻省理工开源!LidarDM: 生成逼真、合理连贯的激光雷达点云数据
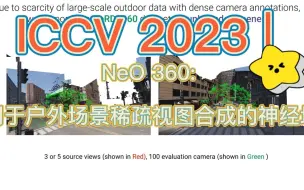
ICCV 2023 | NeO 360: 用于户外场景稀疏视图合成的神经场
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
比赛冠军方案!英伟达最新 | Hydra MDP:端到端多模态规划
今年的智驾只有一个声音:端到端+大模型
自动驾驶规划控制的未来是什么?
zero-shot双目重建算法对镜面物体场景的重建效果
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
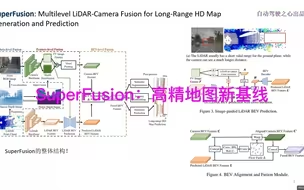
SuperFusion:高精地图新基线
冠军!英伟达荣获CVPR端到端自动驾驶挑战赛第一名
3DGS 高斯泼溅 6千万高斯超大场景重建
KTH最新SOTA!大规模回环闭合 | 基于NeRF的稠密SLAM
太详细了!多传感器融合的策略和方法
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
面试必备!自动驾驶中BEV常考知识点大串讲
ICCV 2023 | CVRecon:重新思考神经重建中三维几何特征学习
多传感器标定的工具箱有哪些?
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高)
CVPR'23 | OCTraN:非结构化交通场景中的3D占用卷积Transformer网络
解决自动驾驶长尾问题,DOME模型结合扩散和OCC技术打造超真实世界模型
视觉3D检测如何做自动标注?
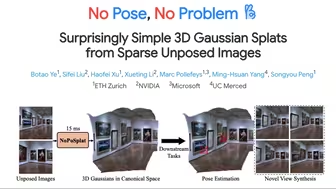
[3DGS进展] ETH, nVidia等提出NoPoSplat,简单的从稀疏无位姿图像生成3DGS的方法,在稀疏输入NVS、可泛化、位姿估计等任务均大幅度提升
【CVPR2023】 自动驾驶场景下理解BEV目标检测的鲁棒性