V
主页
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
发布人
国内首个毫米波视觉融合系列课程,学习链接:https://wrzpl.xet.tech/s/NKFsd,毫米波雷达和相机融合是传感器融合方案中非常受欢迎的方法,也是目前落地最多的方案!通过融合雷达和相机传感器能够充分发挥两者互补关系,从而在整体上提升感知能力。
打开封面
下载高清视频
观看高清视频
视频下载器
超详细的激光雷达相机标定教程!(Lidar-Camera)
毫米波雷达视觉算法CRAFT,这次彻底理解了!
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
毫米波雷达量产实战!Radar是如何获取点云的?
使用YOLOv4完成激光雷达点云下的3D目标检测!
World Model!大火的世界模型到底是什么?
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
麻省理工团队 | Fast-LiDARNet:基于激光雷达的高效鲁棒端到端导航框架
直播分享!最新SOTA,多模态3D目标检测新方案(CVPR2023)
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
自动驾驶如何学好C++?
多传感器标定的工具箱有哪些?
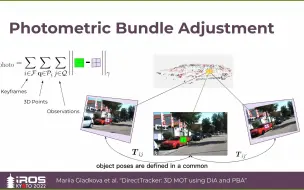
最新3D多目标跟踪方法DirectTracker:基于直接图像对齐和光度学束调整的3D多目标跟踪(IROS2022)
TensorRT部署车道线检测最强算法!Ultra-Fast-Lane-Detection-V2
多模态3D检测相关2D和3D感知基础知识
高精地图制作关键技术及领域主流方案分享-part1
激光雷达3D目标检测算法有哪些?怎么分类的?
ECCV2022最新 | 缺少点云数据?LiDARGen生成真实的激光雷达点云
轨迹预测到底预测个啥???轨迹预测入门必备!
透彻!特斯拉occupancy network详解
一文尽览:自动驾驶大语言模型应用综述分享
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
Nuscenes、KITTI等多个BEV开源数据集介绍!
端到端算法是什么?自动驾驶领域是怎么做的?
地平线VAD又又又上新了!VADv2比v1强在哪里?一起来听
CVPR2022 | MeMOT:具有记忆的多目标跟踪
使用概率深度补全的3D激光雷达重建(IROS2022)
最新多传感器融合数据集!Hilti SLAM Challenge Dataset(RAL-IROS 2022)
关于自动驾驶的一切(层级划分/Lidar/Radar/视觉感知/AI与发展等)
自动驾驶多传感器数据融合(3):单目标跟踪算法
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
面试必备!自动驾驶中BEV常考知识点大串讲
清华大学最新!GaussianFormer:Gaussians进军视觉Occupancy任务!
端到端趋势下,传统规控还有未来么?
ICCV 2023 | SparseFusion:基于稀疏表征融合的多模态3D新方案!
83FPS,史上最快 | IA-SSD: 基于point方式的高效激光雷达点云3D目标检测网络(CVPR2022)
LiDAR-Camera多传感器融合!StradVision X VUERON Technology