V
主页
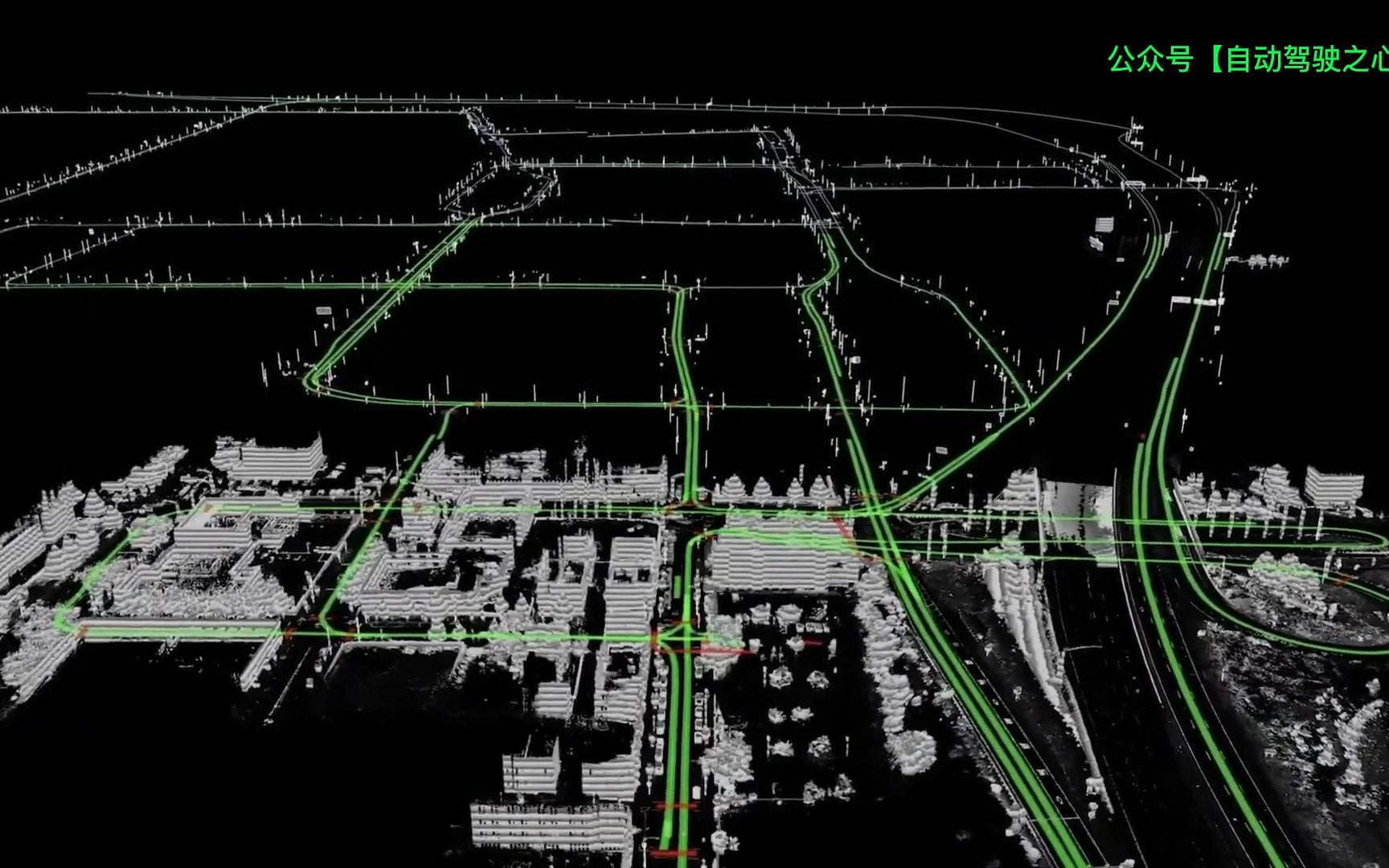
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
发布人
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
打开封面
下载高清视频
观看高清视频
视频下载器
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
禁止低效啃书!《清华高翔博士-视觉SLAM14讲》视频教程全集,简直不要太强!
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
超越YOLOv10/11、RT-DETRv2/3!最新实时目标检测SOTA模型D-FINE
OmniDet:环视鱼眼多任务感知网络(深度估计、视觉里程计、语义和运动分割、目标检测和镜头污染检测)
YOLOv11多模态 结合CFT模块 融合可见光+红外光双输入
完爆YOLOv11!Transformer+目标检测新算法性能无敌,狠狠拿捏CV顶会
TensorRT部署车道线检测最强算法!Ultra-Fast-Lane-Detection-V2
视觉SLAM进阶-从零开始手写VIO
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
2022最新 | HybridNets:端到端感知网络(检测+可行使区域分割+车道线三大任务)
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
【IROS2022】MPC-PF:使用势场的自动驾驶动态目标的社会交互感知轨迹预测
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
毫米波雷达视觉算法CRAFT,这次彻底理解了!
IROS 2024 | 苏黎世大学全新视觉里程计,性能暴涨60%!
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
CVPR2022 | SHIFT:当前自动驾驶最大的多任务合成数据集(雾天/雨天/雪天,检测、分割、深度图、实例分割、光流)
速度和精度双SOTA! TPAMI 2022最新车道线检测算法(Ultra-Fast-Lane-Detection-V2)
CVPR2023最新!TBP Former:BEV下以视觉为中心的自动驾驶中的联合感知和预测网络
【CoRL2022】路径规划新SOTA!PlanT:通过目标级表示的可解释的规划Transformers
小波变换+注意力机制再登Nature!这15种创新突破,你还不知道?
ECCV2022最新 | 缺少点云数据?LiDARGen生成真实的激光雷达点云
使用概率深度补全的3D激光雷达重建(IROS2022)
太强了!RenderOcc:仅使用2D标签和Nerf监督视觉Occupancy
透彻!特斯拉occupancy network详解
第五届SLAM论坛高飞报告
香港大学最新!ROG-map:高效的以机器人为中心的占用网格地图
ICRA2023 | 激光雷达相机内外参联合标定方案!
自动驾驶入门技术全栈实战解析-1-感知篇
特斯拉的4D自动标注详解!为什么无标注数据work?
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
自动驾驶多传感器数据融合(1):什么是多传感器融合?
英伟达最新 | OmniDrive:用于3D感知、推理和规划功能的自动驾驶大语言模型
特斯拉的World Model是什么?怎么做端到端训练?
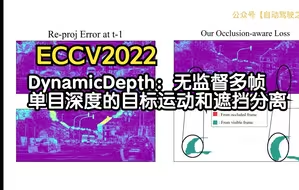
ECCV2022 | DynamicDepth:无监督多帧单目深度的目标运动和遮挡分离
大火的BEVFusion算法详解
fastlio建图与自主导航演示