V
主页
Generalizing and improving regularized predictive control for legged robots
发布人
The talk was given as part of the ICRA 2021 workshop on recent advances in MPC and RL for legged robots video link: https://www.youtube.com/watch?v=VRNqz1w-87o&t=10s
打开封面
下载高清视频
观看高清视频
视频下载器
MPC and RL, two different roads to legged locomotion, and that's OK
(Humanoids 2023) Learning Safer Footstep Planning Policies for Legged Robots
Combining Learning-Based Locomotion with Model-Based Manipulation for Legged
Tailoring model complexity in MPC of legged locomotion
[24 T-RO]Hybrid iLQR MPC for Contact Implicit Stabilization on Legged Robots
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
22年跑的legged_control 现在看依旧炸裂
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
(Talk ICRA 2024) Actor-Critic Model Predictive Control
why choose model based reinforcement learning
Model and data, two essential ingredients for controlling legged robot
Learning legged locomotion, RL as one tool in an engineered system
Online trajectory optimization for dynamic aerial motions of a quadruped robot
How to design nonlinear MPC with deep learning prediction model
Control is dead ?control+ learning才是未来
Decaying Action Priors for Accelerated Imitation Learning of Torque-Based Legged
Semantic Traversability Estimation Using Pose Projected Feature
人形机器人灵巧手臂最新成果
(Humanoids 22)Musculoskeletal Wheeled Robot Musashi-W for RealWorld Applications
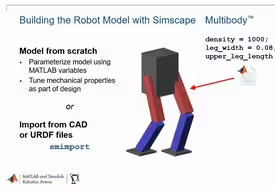
双足机器人的建模与仿真 MATLAB and Simulink
Highly dynamic gaits controlled by a whole-body MPC
Foothold Evaluation Criterion for Dynamic Transition Feasibility for Quadruped
solving the walking robot problem with reinforcement learning
B2机器狗负重夜爬太子尖
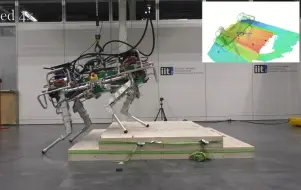
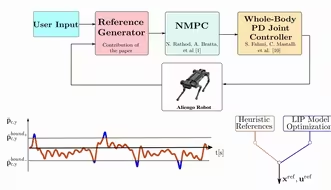
Optimization-Based Reference Generator for Nonlinear Model Predictive Control
MIT Robotics - Marco Hutter - Robots in the wild
Agile Continuous Jumping in Discontinuous Terrains
autonomous path planning over curved uneven path
Learning Morphologically Adaptive Locomotion Controllerfor Quadruped
双足机器人步态生成 MATLAB and Simulink
SOTA ! 浙大最新成果!四足强化学习走梅花桩!
呐, 这就叫优雅~
这下真狗了 Boston Dynamics
Humanoid Locomotion as Next Token Prediction
Sampling based path replanning
Part 3 (Final) - How to Solve Inverse Kinematics of a 4 Leg Robot
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
最新视频 波士顿动力 Atlas 万圣节
Reinforcement Learning for Versatile, Dynamic, and Robust Bipedal Locomotion
四足机器人足臂协同 ocs2 qm_control 开源项目学习