V
主页
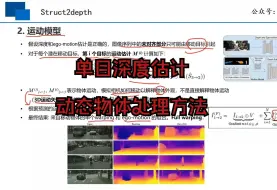
单目深度估计-动态物体处理方法
发布人
课程地址:https://app0S6nfQRG6303.h5.xiaoeknow.com 一个专注3D视觉领域课程分享的平台!依托公众号3D视觉工坊与计算机视觉工坊。 课程主要包括:自动驾驶、SLAM、三维点云、三维重建、机械臂抓取与位姿估计、结构光等。
打开封面
下载高清视频
观看高清视频
视频下载器
如何高效学习单目深度估计?
单目深度估|动态物体处理方法
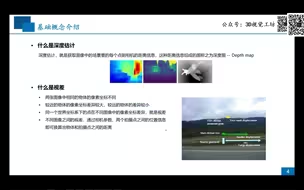
单目深度估计绪论
单目深度估计|连续帧方法实战课
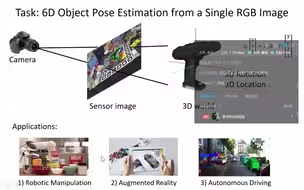
基于几何信息指导的单目6D物体姿态直接回归算法
苏黎世联邦理工:利用事件相机进行单目稠密深度估计
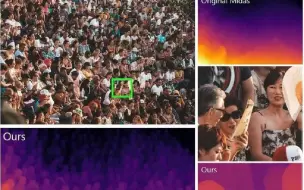
Depth Anything!最强开源单目深度估计SOTA!
NeurlPS 2023 扩散模型对光流和单目深度估计的惊人有效性!
速度提升10倍以上!Depth Anything V2更稳健、精细的单目深度估计
BMVC'24开源 | BaseBoostDepth:更强大的自监督单目深度估计
CVPR满分论文!即插即用的6D物体姿态估计大模型(BOP排行榜第一)
单目无监督深度估计综述
[CVPR2022] 阿里巴巴: 用于单目深度估计的神经窗口全连接CRF
这绝对是质量最高的单目深度估计开源方案!
让NeRF动起来!PhysGaussian:生成任何物体的真实运动!
传统深度估计方法实战
Talk|香港大学杨丽鹤:Depth Anything V2 - 更精细更鲁棒的单目深度估计基础模型
CVPR2024开源NetTrack:跟踪高动态物体!
绪论|单目相机标定理论及张正友标定法(上篇)
Occupancy Networks后处理
高速结构光三维面形测量方法
Open3D与点云处理简介(公开课)
ECCV'24开源 | DoubleTake深度估计& 三维重建最强解决方案!
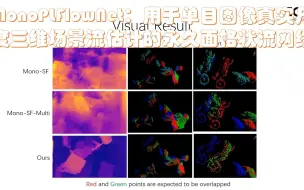
MonoPLFlowNet:用于单目图像真实尺度三维场景流估计网络
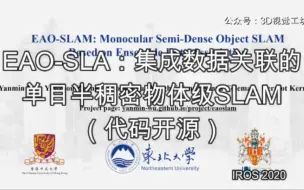
EAO-SLA:集成数据关联的单目半稠密物体级SLAM,代码开源(IROS2020)
深度相机概述
点云3D深度学习模型与实践
[ICCV 2021] 基于水体流动的可微框架进行水下单目3D重建
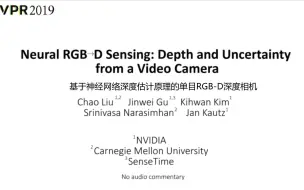
CVPR2019论文:基于神经网络深度估计原理的单目RGB-D深度相机
太稳啦!Gaussian Splatting杀入6D物体位姿估计!
[ICCV2021] ROMO:单目、单阶段、多人的3D语义分割方法
LightGlue:最强轻量级特征匹配?
光学3D测量技术原理及应用
如何进行三维重建?从单帧深度估计到完整模型重建
Occupancy的工程细节
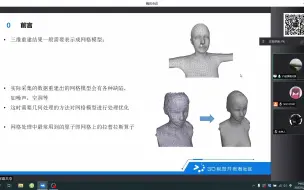
三维重建中的网格处理算法分享(公开课)
互补滤波姿态估计、卡尔曼滤波姿态、高度估计
[ICRA2021] SDK:基于深度学习和显著性估计的点云关键点检测
当3DGS遇上可泛化物体位姿估计
如何处理视觉SLAM长期定位中的外观变化和轨迹漂移?