V
主页
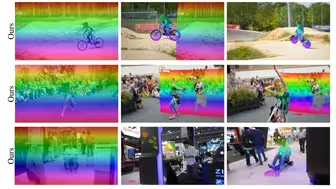
如何处理视觉SLAM长期定位中的外观变化和轨迹漂移?
发布人
如何处理视觉SLAM长期定位中的外观变化和轨迹漂移? 在「3D视觉工坊」微信公众号回复:「原论文」,获取论文代码和链接,快学起来! 今天笔者想为大家分享一项最新开源的Lifelong SLAM工作,名为ObVi-SLAM,有助于解决视觉SLAM在室内/室外的长期定位中遇到的光照变化、视角变化、环境变化以及轨迹漂移问题。@3D视觉工坊
打开封面
下载高清视频
观看高清视频
视频下载器
NTU开源 | AirSLAM:高效且 光照稳健的点线视觉SLAM系统 嵌入式运行速度可达40HZ
MIT最新突破!SplaTAM:实现高速SLAM与实时3D渲染的全新方法!
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
戴森机器人实验室发布SuperPrimitive:三维重建&视觉里程计&深度补全轻松搞定!
牛津VGG团队最新开源!Flash3D:一张图像重建整个3D场景!通用性超强!
ICCV2021,浙大工作!遮挡环境下基于学习的未知空间占用分布预测,机器人运动轨迹更加光滑、安全!
清华搞定无人机!LVCP:雷达-视觉紧耦合协同定位!无需先验地图和初始位姿!
ICRA2022:自适应环境的移动机器人自主导航
ECCV'24开源 | LocoTrack: 塑造SLAM新纪元!6倍加速! 跟踪一切最新SOTA!
极快跟踪一切!DOT:无惧遮挡!
CVPR2024开源NetTrack:跟踪高动态物体!
ICRA23开源 !动态环境下高鲁棒的雷达MOT SLAM!
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
20+FPS!最新开源!加上回环检测的NeRF SLAM竟是如此精确!
来自牛津大学最新论文,统一的多模态地标跟踪,用于紧密耦合激光雷达-视觉-惯性里程计
3D Gaussian Splatting还能更快吗?200+FPS!15倍压缩!
让NeRF动起来!PhysGaussian:生成任何物体的真实运动!
南洋理工大学: 使用固态雷达的轻量级3D定位和映射(代码开源)
港科大&南科大 跨平台和环境的统一多传感器SLAM数据集
【全568集】清华大佬终于把Python整理成动画片了,教学通俗易懂,2024最新版,学完即可就业!拿走不谢,别再走弯路了,学不会我退出IT界
CVPR23开源 超越LoFTR!大尺度变化下的特征匹配!
国内首个面向具身智能方向的理论与实战系统课程
GNSS、IMU、Lidar多传感器因子图融合定位效果展示
透彻剖析室内外激光SLAM算法与实战系列课程-室内激光SLAM建图定位实战
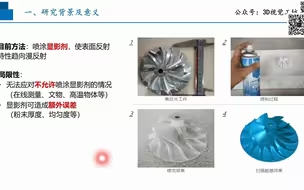
高反光表面三维视觉测量方法
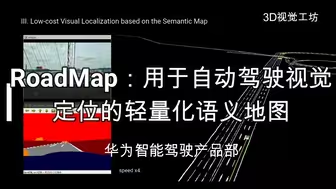
华为最新工作:RoadMap:用于自动驾驶视觉定位的轻量化语义地图
端到端!首个开源视觉Transformer四旋翼控制避障方案!
【3D视觉工坊】第七期公开课:图像对齐算法
ECCV'24开源 | 拳打ORB3脚踢DROID!强化学习+VO=精度暴涨19%!
小白如何手写g2o优化? 残差构建、雅克比推导、优化函数
Splatam:用于稠密RGB-D SLAM的3D高斯的溅射、跟踪和建图
Mobile-Seed:联合语义分割和边缘检测!
机械臂抓取-开发环境搭建
如何轻松拿捏LIO-SAM-数学基础篇
最新ICRA2021论文,基于成像激光雷达的稳健位置识别,代码开源!
TRLO: An Efficient LiDAR Odometry with 3D Dynamic Object Tracking and Removal
什么?不做时间同步也可以实现LiDAR-相机三维重建?
高速结构光三维面形测量方法