V
主页
[ICCV 2021] 基于水体流动的可微框架进行水下单目3D重建
发布人
https://www.youtube.com/watch?v=F6R52hfAs6s 本文提出了一种方法,用于从放置在水面上方的单个固定相机重建水下环境的 3D 形状。 这是第一个能够同时检索野外动态水面结构和静态水下场景几何结构的单相机解决方案。具体来说,提出了一种新颖的可微框架, 该框架集成了折射界面处斯涅尔定律的光线投射、多视图三角测量和专门设计的损失函数,并且无需校准,因此很容易在户外环境中收集数据。实验结果表明,该方法能够在实验室环境和野外的各种场景中实现稳健和高质量的重建!
打开封面
下载高清视频
观看高清视频
视频下载器
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
从零搭建一套结构光3D重建系统 [理论+源码+实践]
ECCV'24开源 | DoubleTake深度估计& 三维重建最强解决方案!
四旋翼模型与控制基础
Open3D与点云处理简介(公开课)
牛津VGG团队最新开源!Flash3D:一张图像重建整个3D场景!通用性超强!
ICML'24开源 !LEO:首个三维世界中的具身通用智能体-上篇
如何学习NeRF/3DGS-SLAM?(公开课直播回放)
极快跟踪一切!DOT:无惧遮挡!
单目深度估计|连续帧方法实战课
三维重建中的网格处理算法分享(公开课)
无相机姿态40秒重建3DGS方法
清华最新开源万能3D分割一切!
如何轻松拿捏LIO-SAM-数学基础篇
如何进行三维重建?从单帧深度估计到完整模型重建
四旋翼模型简介-御风250模型
LVI-SAM代码实战与评估
Splatam:用于稠密RGB-D SLAM的3D高斯的溅射、跟踪和建图
【3DGS】自定义相机教程(含代码)(三维高斯泼溅)
无人机|PID算法详解与实战(上)
国防科大最新 | DistGrid:基于分布式神经辐射场阵列的大规模场景重建
四旋翼无人机-ADRC整体介绍
国内首个面向具身智能方向的理论与实战系统课程
PID控制器原理讲解
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
深度相机概述
重磅开源SA-GS:重新定位最新大场景3D重建SOT
中科院最新CityGaussian:VRAR时代的城市重建新标杆-上篇
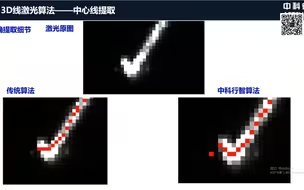
3D线激光相机检测技术解析与应用分享
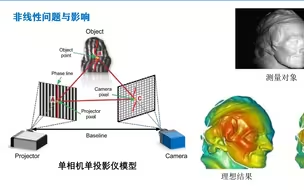
结构光的非线性问题与校正
中科院最新CityGaussian:VRAR时代的城市重建新标杆
港科大最新 开放词汇3D物体检测新SOTA-CoDAv2p-下篇
ECCV'24开源 | 拳打ORB3脚踢DROID!强化学习+VO=精度暴涨19%!
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!
这绝对是质量最高的单目深度估计开源方案!
高速结构光三维面形测量方法
CVPR2023|基于深度学习MVS的最新进展 GeoMVSNet
3DGS进化?2DGS颠覆3D场景重建!
给任何模型上色!腾讯打通三维重建最后一关:高质量纹理生成!
点云3D深度学习模型与实践