V
主页
京东 11.11 红包
从未见过如此详细的CPU并行讲解!基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速!
发布人
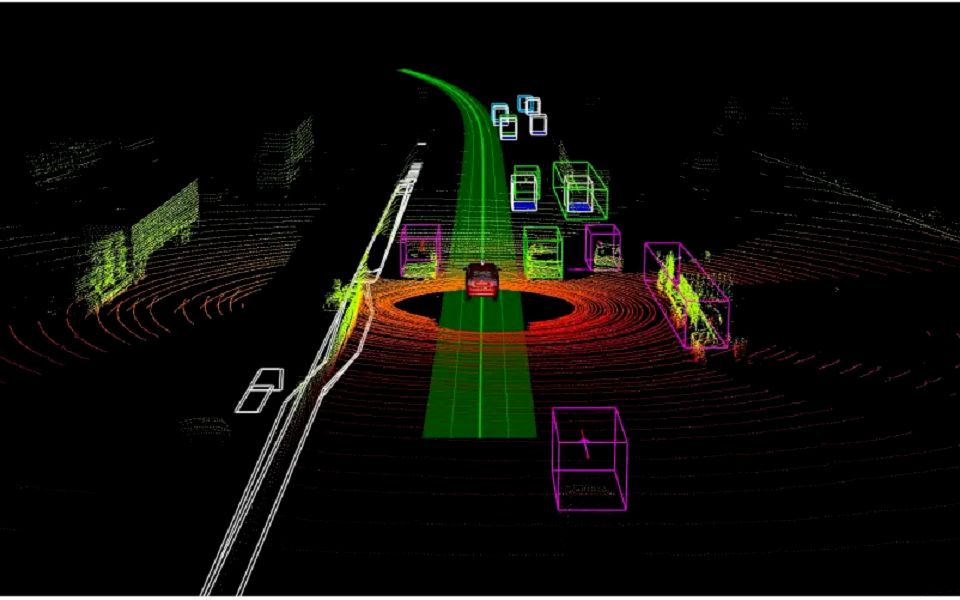
全搞定!基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速!完整课程咨询小助理微信:AIDriver004 自动驾驶之心官网正式上线了:www.zdjszx.com(海量视频教程等你来学) ①YOLOv3~YOLOv8/YOLOX/PPYOLO系列全栈学习教程 ②国内首个BEV感知全栈学习教程(纯视觉+多传感器融合方案) ③多传感器融合中的毫米波雷达-视觉融合感知全栈教程 ④Lidar+Radar+Camera+IMU离线/在线近20+标定方案教程等你来学 ⑤模型部署实战:基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速 ⑥规划控制理论&实战课程:PID、LQR、MPC全掌握 课程咨询联系AIDriver004,科研合作及辅导联系AIDriver002。
打开封面
下载高清视频
观看高清视频
视频下载器
泰裤辣!编辑器的环境配置详细教程来了!基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速!
为什么自动驾驶离不开模型部署?
MetaBEV:解决BEV检测和地图分割的传感器故障新方案
为什么说自动驾驶离不开模型量化?
面试必备!自动驾驶中BEV常考知识点大串讲
【比啃书效果还好!】作者亲自讲解《统计学习导论》python版!为什么我不能早点知道!
端到端算法是什么?自动驾驶领域是怎么做的?
看到了这个视频,彻底搞懂了PETR算法!
多传感器融合!BEV感知融合算法介绍
CUDA中Grid和Block是个啥?详解.cu和.cpp的互相引用及Makefile
讲明白了!端到端算法评估指标详解
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
自动驾驶中的多传感器融合状态估计如何建模?
【GPU算力进化史】从CUDA Core到Tensor Core,FP32到TF32的双重变革——AI性能大爆发!
下一波AI浪潮:物理AI | 英伟达 | 2024.10.25
自动驾驶规控工程师必备技能点!Coupling Trajectory Planning是个啥?
从0到1!彻底搞懂BEVFormer算法原理
全搞定!基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速!
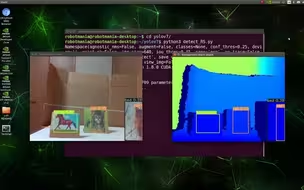
源码实战!使用RealSense和Jetson Nano完成YOLOv7部署
面向下一代自动驾驶:全栈里程碑综述汇总
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
大火的BEVFusion算法详解
彻底搞懂!CUDA编程之:如何安装Nsight system及compute
英伟达的AI“泡沫”,到底还能撑多久?
L4自动驾驶感知的终极形态会是协同感知吗?UCLA顶级博士告诉你答案!
端到端模型上车了!GraphAD:国内首个可实车量产部署的端到端建模范式
以特斯拉为案例:自动驾驶仿真框架分析(下,仿真应用/2D检测/3D检测/车道线)
跟知乎大V一起来学BEV!视觉BEV感知和跟踪算法详解
BFS是个啥?为什么规划控制需要它?
Hydra MDP | 英伟达如何理解端到端自动驾驶?
简单聊聊:国产AI芯片和英伟达GPU的差距情况(含福利)
规划控制都有哪些模块?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
系统回顾!基于Visual Transformer的分割模型综述
激光雷达3D目标检测算法有哪些?怎么分类的?
还在为数据集发愁?!带你了解自动驾驶常见数据集哪里找!
使用YOLOv4完成激光雷达点云下的3D目标检测!
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
地平线VAD又又又上新了!VADv2比v1强在哪里?一起来听
192核384线程!AMD发布地表最强服务器CPU EPYC 9005产品
自动驾驶安全的关键!| 轨迹预测中的经典模型大盘点