V
主页
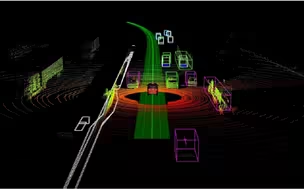
以特斯拉为案例:自动驾驶仿真框架分析(下,仿真应用/2D检测/3D检测/车道线)
发布人
以特斯拉为案例:自动驾驶仿真框架分析(下,仿真应用/2D检测/3D检测/车道线)
打开封面
下载高清视频
观看高清视频
视频下载器
TensorRT部署车道线检测最强算法!Ultra-Fast-Lane-Detection-V2
大牛带你彻底搞懂UltraFastLane车道线检测算法(一)
自动驾驶多传感器数据融合(4):多目标跟踪算法
多模态3D检测相关2D和3D感知基础知识
车道线检测的未来是MapFree吗?面向可量产方案总结
ITSC2023 | LimSim:长期可交互多场景交通仿真器
端到端基础!绕不开的感知模块
数据为王!车道线数据高效生成策略有哪些?
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
毫米波雷达视觉算法CRAFT,这次彻底理解了!
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
史上最全!一次性梳理自动驾驶鲁棒性研究
【CVPR2023】 自动驾驶场景下理解BEV目标检测的鲁棒性
直播分享!最新SOTA,多模态3D目标检测新方案(CVPR2023)
CVPR 2023 | Mask DINO:面向检测和分割的统一Transformer最强框架!
自动驾驶规划控制的未来是什么?
使用YOLOv4完成激光雷达点云下的3D目标检测!
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
落地之殇 | 联合预测是端到端正确的道路么?
牛的!大佬是如何几分钟聊透时空联合规划框架的?
从0到1!彻底搞懂BEVFormer算法原理
CVPR2023 Highlight | Unisim:Nerf+自动驾驶,这不会是魔法吧?
最新!CoRL 2022 |Waymo分享自动驾驶行为 模型方案
实时3D目标检测 | 利用稀疏表示来提高嵌入式系统上3D目标检测模型的运行速度!
轻舟智航最新成果!PillarNeXt:LiDAR点云中的3D检测网络如何设计?
多传感器标定的工具箱有哪些?
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
看完缓解了我的玉玉症!手把手教你如何使用CUDA进行矩阵乘法!
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
BFS是个啥?为什么规划控制需要它?
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
从未见过如此详细的CPU并行讲解!基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速!
LLM+自动驾驶还有什么搞头?LLM驱动的智能体应用探析!
拯救你的CUDA!什么是bank,为什么会发生bank conflict???
面向下一代自动驾驶:全栈里程碑综述汇总
校招和社招转行人必看!2023年如何入局自动驾驶?
几可乱真!面向真实场景的世界模型居然被用得这么六!
自动驾驶多传感器数据融合(1):什么是多传感器融合?