V
主页
自动驾驶安全的关键!| 轨迹预测中的经典模型大盘点
发布人
自动驾驶安全性的关键!| 轨迹预测的相关经典模型
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
透彻!特斯拉occupancy network详解
端到端算法是什么?自动驾驶领域是怎么做的?
冠军分享!QCNeXt:面向下一代多智能体联合轨迹预测新框架(CVPRW2023)
爆肝整理!CVPR2024可复现论文合集,原文/代码/演示全都有!(深度学习/计算机视觉)
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
自动驾驶汽车是如何在高精地图中建立精确位置的?
在线高精地图与城市NOA是什么关系?为什么如此重要?
面向下一代自动驾驶:全栈里程碑综述汇总
高精地图制作关键技术及领域主流方案分享-part1
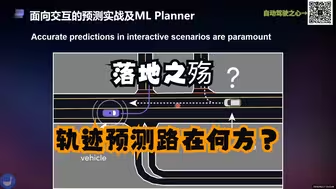
落地之殇 | 联合预测是端到端正确的道路么?
太详细了!多传感器融合的策略和方法
自动驾驶中的多传感器融合状态估计如何建模?
端到端模型上车了!GraphAD:国内首个可实车量产部署的端到端建模范式
【CVPR 2024 】ViDAR视觉点云预测赋能大规模端到端自动驾驶
Waabi最新!UnO:用于感知和预测的SOTA模型(超越监督方式)
车辆轨迹有多少种玩儿法?CitySim数据集:轨迹预测、仿真、数字孪生应有尽有!
英伟达提出EmerNeRF:大规模动态自动驾驶场景重建
内卷时代如何降低自动驾驶数据的标注成本?双域主动学习可能是答案!
牛的!大佬是如何几分钟聊透时空联合规划框架的?
跟知乎大V一起来学BEV!视觉BEV感知和跟踪算法详解
为自动驾驶构建城市规模的神经辐射场
最近有哪些自动驾驶方向的github仓库值得star?
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
【IROS2022】Voxfield:用于在线规划和三维重建的非投影符号距离场
2025秋招规控/轨迹预测,面试上来就问端到端联合预测。。。
自动驾驶仿真利器!Street Gaussian:基于3D Gaussian Splatting的动态三维街景建模
强推!草履虫都能听懂!B站最全最详细的【时间序列预测模型】教程,从入门到精通!(LSTM/Informer/ARIMA/PandasTransformer)
从0到1!彻底搞懂BEVFormer算法原理
B站讲的最好的AI大模型实战(2024最新版)LLM+RAG系统+GPT-4o+OpenAI,全部都讲明白了!!
GPT-4V与自动驾驶更配?GPT-4V在自动驾驶中的早期探索!
大火的BEVFusion算法详解
基于交互感知的自动驾驶车辆轨迹规划——神经网络与模型预估计控制的集成
自动驾驶方向博士申请小白指南,看这个就够啦 !从论文准备到套磁导师!
Corner Case不可怕!自动驾驶Corner Case可控生成系统性解决方案来优化!
Segment Any Point Cloud:运用视觉基础模型分割一切点云
[ICML 2024] 揭示与利用隐藏注意力下沉:通过注意力校准在无需训练的情况下增强大型语言模型
Transformer本质上在解决什么事?迪哥手把手带你从零基础开始搭建Transformer!论文解读+源码复现,草履虫都能学会!-人工智能/深度学习/大模型