V
主页
京东 11.11 红包
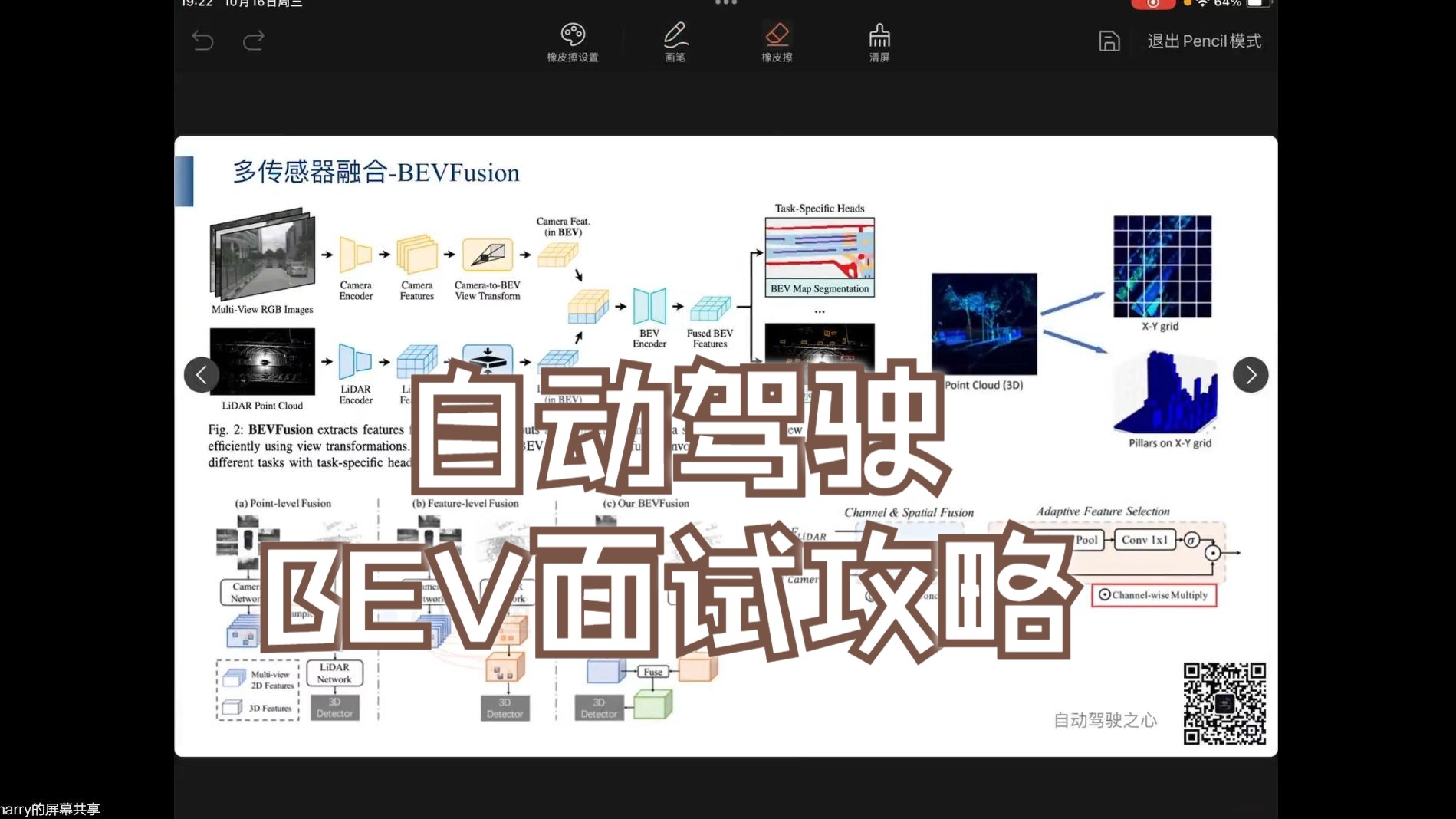
面试必备!自动驾驶中BEV常考知识点大串讲
发布人
为了卷赢面试,平台最近联合harry老师打造的《自动驾驶求职面试全栈教程》已经正式开课!直播形式,每周准时开讲,灵活互动,求职经验倾囊相授,有需求的小伙伴不要错过~ 🎈小班课立足自动驾驶算法工程师工作中实际问题+求职面试中的核心考点!面向实际问题的求职才是拿offer利器! 🎈数学、深度学习、感知模块、端到端、数据闭环、部署等热门方向一网打尽,梳理核心知识点,学习不盲目! 🎈求职面试技巧大揭秘:简历亮点、面试软技能等必不可少! 🎈课程链接点击有惊喜:https://wrzpl.xetslk.com/s/4gcnr2
打开封面
下载高清视频
观看高清视频
视频下载器
太详细了!多传感器融合的策略和方法
一文尽览:自动驾驶大语言模型应用综述分享
端到端数据格式是什么样的?快来看看吧
什么是端到端自动驾驶?什么是基础world model?
端到端算法是什么?自动驾驶领域是怎么做的?
特斯拉的World Model是什么?怎么做端到端训练?
自动驾驶面试一百问!秋招社招全搞定
端到端算法有哪些优势?完爆传统感知规控?
端到端基础!绕不开的感知模块
端到端自动驾驶:SparseDrive 算法详解
自动驾驶绕不开的仿真!LightSim:从零开始搭建一个真实、可控、可扩展的自动驾驶仿真平台
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
透彻!特斯拉occupancy network详解
英伟达冠军方案!Hydra-MDP:多模态端到端自动驾驶详解
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
上车必备的Occupancy算法真值是如何获取的?
绝对前沿!全面剖析自动驾驶具身理解任务!
性能提升近40%!ViPlanner:室内外局部导航全搞定(ICRA 2024)
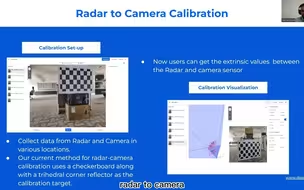
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
自动驾驶如何学好C++?
史上最全 | 自动驾驶中的多传感器标定校准(Lidra/Radar/Camera/Stereo/IMU等)
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
自动驾驶规控工程师必备技能点!Coupling Trajectory Planning是个啥?
Segment Any Point Cloud:运用视觉基础模型分割一切点云
自动驾驶中的多传感器融合状态估计如何建模?
EM Planner is all u need?
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
文员面试必会的快捷键
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
在线高精地图与城市NOA是什么关系?为什么如此重要?
数据为王!自动驾驶开源数据体系现状与未来
轨迹预测到底预测个啥???轨迹预测入门必备!
CVPR2024最新BEV-Planner:Ego Status对于开环端到端自动驾驶的影响有哪些?
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
从0到1!彻底搞懂BEVFormer算法原理
【教程】40分钟教你自制自动驾驶智能车
端到端趋势下,传统规控还有未来么?
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)