V
主页
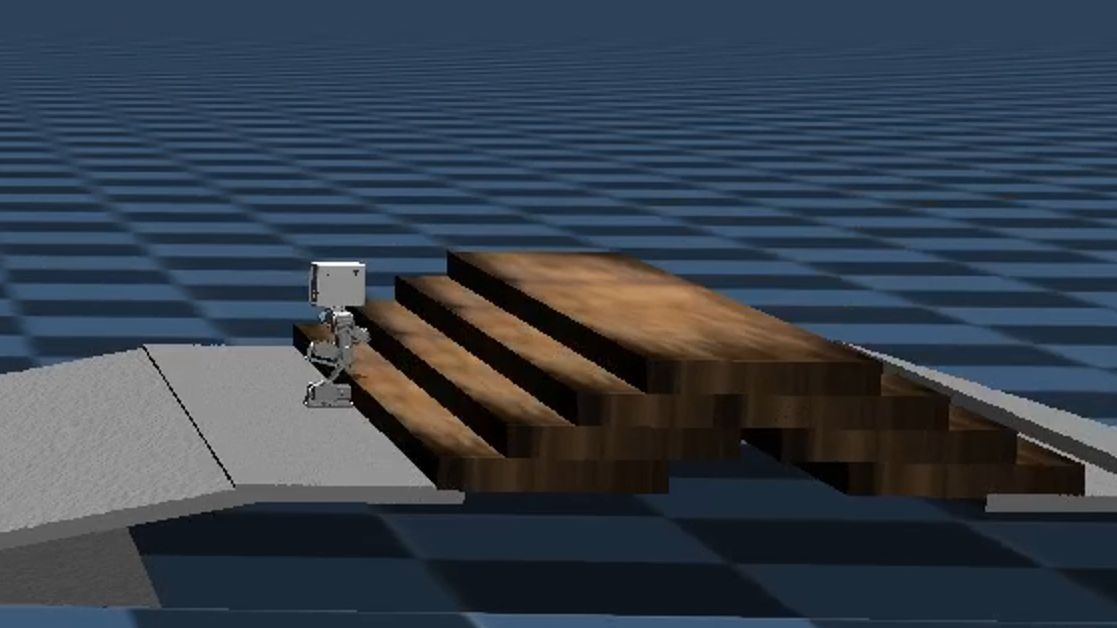
小派上楼梯啦|双足机器人强化学习
发布人
参考论文:Toward Understanding Key Estimation in Learning Robust Humanoid Locomotion [2403.05868] Toward Understanding Key Estimation in Learning Robust Humanoid Locomotion 感谢王志成博士的分享与耐心解答,感谢高擎机电小伙伴们的帮助,小派π向前冲呀!!!!
打开封面
下载高清视频
观看高清视频
视频下载器
双足机器人isaacgym训练后sim2sim到mujoco扭成麻花了
双足机器人强化学习humanoid-gym sim2sim详细学习过程,Openloong的urdf为例
人形双足模仿学习强化学习AMP ASE Exbody求助
8万元的双足机器人,走路姿势“不正经”
【Python】人形机器人——强化学习
[上]6个人形双足强化学习开源项目,论文讲解,代码速读,FLD,PBRS,footstep,ExBody,humanplus,humanoid-gym
[搬] 稳健的类人机器人行走-通过强化学习增强基于模型的控制
仿迪士尼双足机器人,mini版,高约35cm
[下]6个人形双足强化学习开源项目,论文讲解,代码速读,FLD,PBRS,footstep,ExBody,humanplus,humanoid-gym
训练的四足为何跪着跑
强化学习魅力时刻
青龙openloong 上10cm台阶 上0.2rad斜坡
dreamWaq复现尝试
[自制]手搓双足机器人样机demo|model-based控制|落后轻喷
OpenLoong开源双足机器人,想强化学习但是我的urdf变僵尸了
四足,轮腿,人形开源项目
仿真实用工具之urdf,mujoco mjcf查看
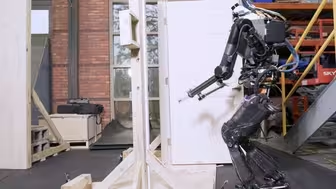
[搬] 双足机器人自主实现开门通过类人行为-Nadia
TITA强化学习迁移
使用ROS2-Control + RL来控制四足机器人
右边两足走路也是双足行走
g1套humanoid_gym
人形机器人 双足机器人 DIY全3D打印
云深处发布托马斯回旋风火轮足机器人
macos 简单基于Mujoco的强化学习环境搭建
Lec8-1: Mujoco Tutorial- 仿真原理,核心模块,与机器人仿真器
为什么要制造人形机器人?
强化学习,启动!
Diffusion Policy 结合 PPO 模仿+强化 (下)
不超8万元的 | 半人形双足机器人 Berkeley Humanoid | 人工智能机器人 | 宇树科技 | 机器人G1 |
开源控制器Baselinewalkingcontroller:双足机器人平地动态行走
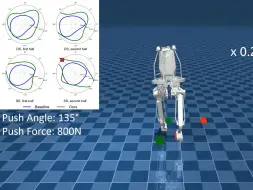
测试行走站立切换和站立抗冲击
手办仿真机器人
Decaying Action Priors for Accelerated Imitation Learning of Torque-Based Legged
【手把手教做轮足机器人】7_滚转姿态控制【原理讲解+代码开源】
强化小伙终于起立了
音乐恐怖,吓倒Spot狗狗了 波士顿动力 万圣节
奔跑有点难度,步态很抽象,大佬们有没有什么好建议
210:cyber 无人船优化反步控制 轨迹跟踪 强化学习Actor-critic架构,李雅普诺夫稳定性,优化反布控制,强化学习(RL),水面舰艇
mujoco和Pinocchio人形机器人足底速度算法验证工具