V
主页
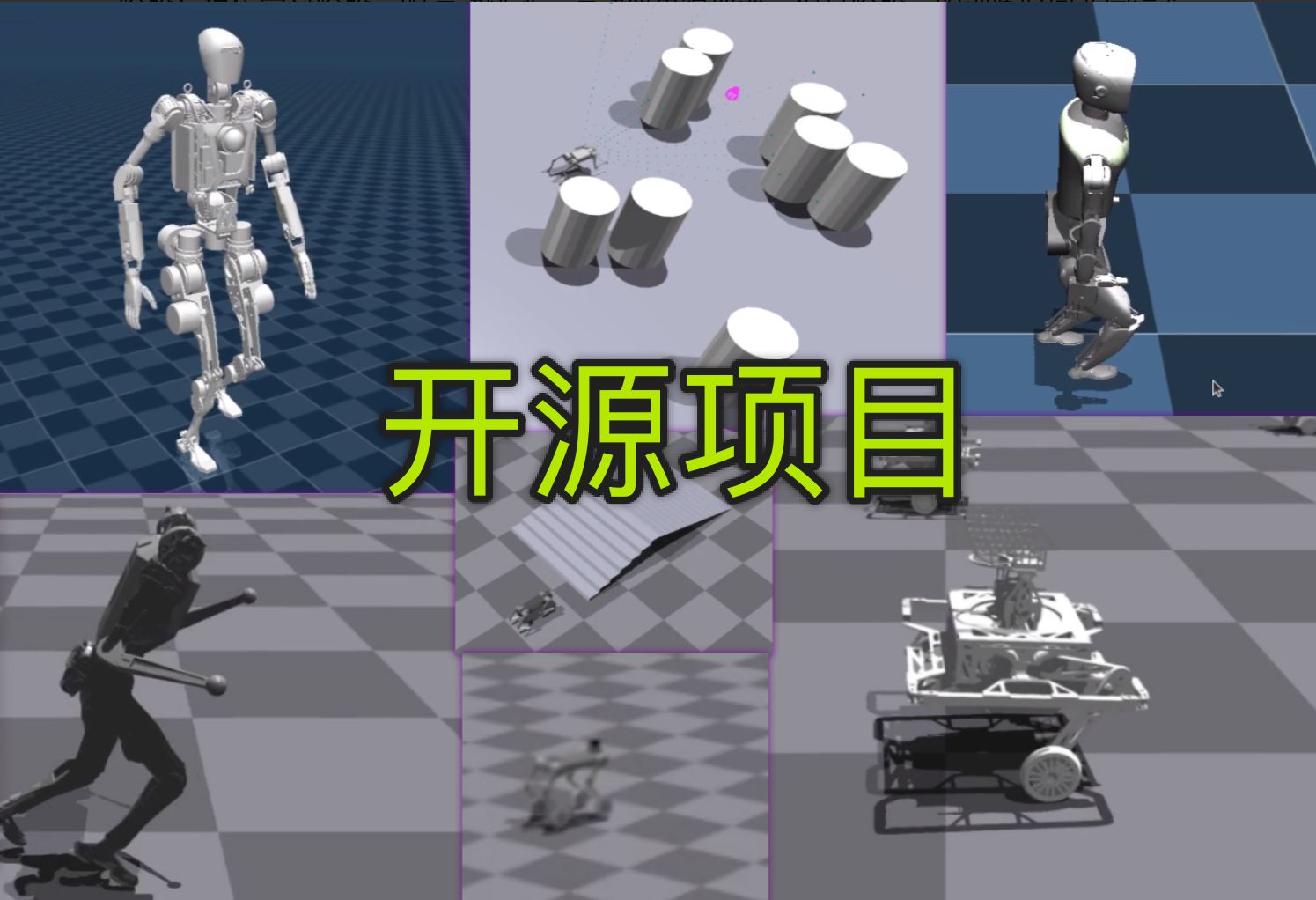
四足,轮腿,人形开源项目
发布人
欢迎大家安利开源项目 以下这些是我最近跑的几个项目,非常适合初学者 四足 1. python项目,rl-mpc-locomotion:https://github.com/silvery107/rl-mpc-locomotion/tree/main ● MPC+强化学习 提供PPT,逻辑清晰梳理了四足机器人运动学和动力学,MPC,WBC,RL(PPO),isaac gym仿真,很适合初学者了解四足全流程 2. C++项目legged_control https://github.com/qiayuanl/legged_control ● MPC 基于 OCS2 和 ros-control实现的开源机器人腿式MPC控制框架,在gazebo仿真的ROS的项目。大佬的项目,适合已经入门的。因为采用的是ROS1 的noetic,只支持到ubuntu20.04系统,ubuntu22.04系统的不要轻易尝试,调bug调哭 3. ABS https://github.com/LeCAR-Lab/ABS ● 强化学习 CMU和ETH的项目,会避障且会目标追踪的四足,跑的飞快。很有趣的一个项目,基于legged_gym和rsl_rl实现的。看到legged_gym和rsl_rl,初学者几乎可以无脑冲,好安装,易上手,大量的开源项目都是基于这两个实现的。 轮腿 1. Wheel-Legged-Gym https://github.com/clearlab-sustech/Wheel-Legged-Gym ● 强化学习 南科大的开源项目, 基于legged_gym和rsl_rl实现的轮腿项目,非常简单易上手 2. legged-robots-manipulation https://github.com/aCodeDog/legged-robots-manipulation/tree/master ● 强化学习 比较少见的基于b2w开源的轮腿项目,对此感兴趣的不要错过了,也基于legged_gym和rsl_rl实现的,so easy 人形 1. humanoid-gym https://github.com/roboterax/humanoid-gym ● 强化学习 星动纪元,Humanoid-Gym 基于legged_gym和rsl_rl,还集成了从 Isaac Gym 到 Mujoco 的 sim-to-sim 框架 2. openloong-dyn-control https://atomgit.com/openloong/openloong-dyn-control ● MPC C++项目,OpenLoong开源项目是由人形机器人(上海)有限公司、上海人形机器人制造业创新中心与开放原子开源基金会(OpenAtom Foundation)共同运营的开源项目。提供了一套基于 MPC 与 WBC 的仿人机器人控制框架,可部署在 Mujoco 仿真平台上。代码框架清晰明了,非常友好的开源项目。支持Ubuntu 22.04.4 LTS, 本ubuntu22.04使用者狂喜。 3. FLD https://github.com/mit-biomimetics/fld/tree/main ● IL+RL 麻省理工仿生学院的开源项目,工作流程包括两个主要阶段:运动表示和运动学习。运动表示阶段:每个运动的采样轨迹重建、每个潜在通道中沿每个运动的采样轨迹的潜在参数以及潜在参数分布。运动学习阶段:模仿学习阶段一的运动轨迹。运动效果很丝滑。但是阶段一的训练时间非常漫长。
打开封面
下载高清视频
观看高清视频
视频下载器
【开源】宇树Go2强化学习部署Demo - walk-these-ways-go2
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
Unitree 2023 ROS暑期学校课程视频01-搭建Gazebo仿真环境玩转四足机器人(上)
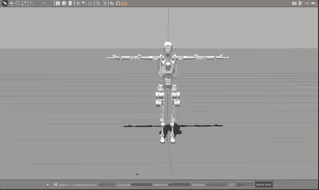
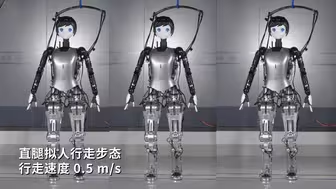
人形机器人强化学习训练方法,为什么腿是直着的?humanoid gym
Isaac Lab中文版文档正式上线!
双足机器人强化学习humanoid-gym sim2sim详细学习过程,Openloong的urdf为例
青龙行走MPC+WBC
MPC + 强化学习![ICRA 24] Actor Critic Model Predictive Control
写了一个人形机器人仿真,适用5或者6自由度的腿形
【rl_sar】四足/人形机器人强化学习算法的仿真验证与实物部署框架
OpenLoong开源人形机器人青龙Gazebo仿真
人形机器人,强化学习sim 2 sim,humanoid gym 训练方法
双足机器人isaacgym训练后sim2sim到mujoco扭成麻花了
这是一条寻求RL+robots合作的视频!
Isaaclab强化学习训练仿真:未来的丧尸电影还需要群演吗?
宇树科技四足机器人Go1仿真(Gazebo下建图导航)
基于IsaacLab的人形机器人强化学习
看看腿,有人感兴趣就开个源
【开源啦!】无刷轮腿平衡机器人
[开源了]全球最小的桌面级双轮足机器人(开源地址在视频简介)
未来家庭新成员报到!达闼全栈自研人形双足机器人XR4“七仙女”加速进化
仿真实用工具之urdf,mujoco mjcf查看
四足机器人控制器分享(webots+matlab)
【镜像开源】pinocchio、crocoddyl 可视化工具,镜像里已经安装好了,链接见简介
【手把手教做轮足机器人】1_概论和机械结构
四足机器人鲁棒&高速移动的强化学习控制器
Berkeley Humanoid 伯克利人形机器人
四足机器人 模型预测控 webots 疑问
青龙人形机器人开源数据集
深度强化学习训练平衡步兵机器人开源
桌面级双轮足产品 XGO-Rider 正式上线
电机版Atlas的模型预测控制
一个关于人形Robust控制器论文的预告
【手把手教做轮足机器人】2_机械设计要点
国产开源人形机器人OpenLoong代码首测
OpenLoong开源双足机器人,想强化学习但是我的urdf变僵尸了
(开源)最迷你的ROS2 机器人,自动路径规划、视觉识别、人体检测跟随、手势识别控制、多形态切换(想要资料评论区留言安排!)
调了两个周,正常走起来了
人形机器人大踏步奔跑
你的第一台机器人!拉东西走路这么简单的动作你也可以