V
主页
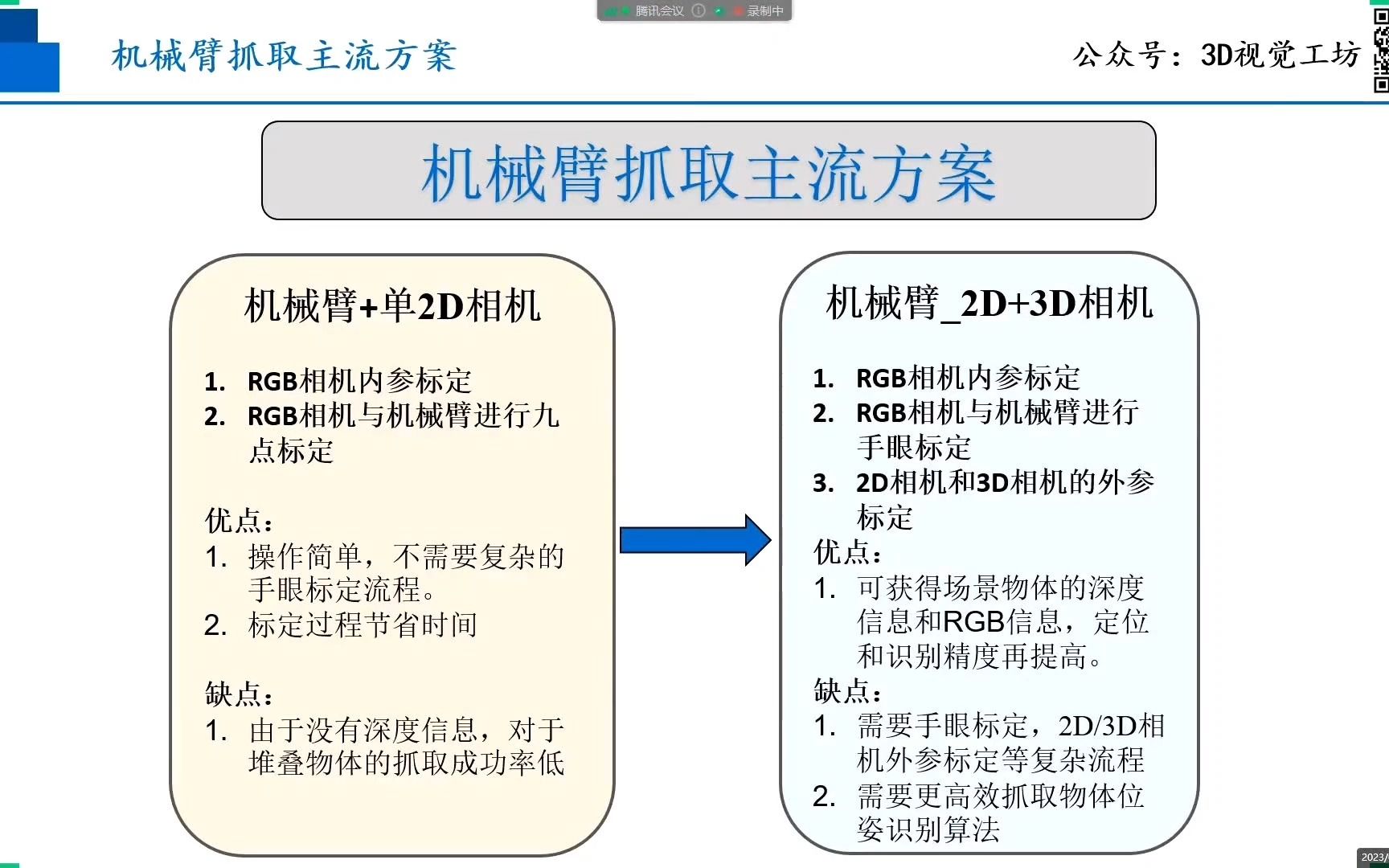
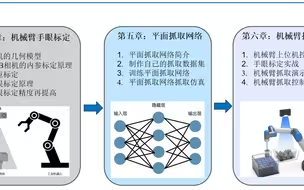
机械臂抓取简介
发布人
#机械臂抓取简介#机械臂抓取# 1、应用场景及行业发展 2、机械臂抓取主流方案 3、3D相机硬件测距原理介绍 4、ROS开发环境介绍 5、开发环境搭建。 主讲介绍:觅云,硕士毕业于东北大学,目前为某头部智能制造公司的视觉算法工程师,致力于机器视觉和机器人运动控制等方向的应用研究。 来源课程:https://lgo.xet.tech/s/44leQd
打开封面
下载高清视频
观看高清视频
视频下载器
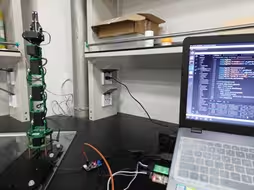
机械臂抓取-开发环境搭建
Open3D与点云处理简介(公开课)
光学3D测量技术原理及应用
基于任务驱动的机器人抓取工作梳理与分享(ICRA2022)
机械臂--开源!
2024华数杯A题机械臂优化Matlab代码求解
帮粉丝做的任务:强化学习控制机械臂完成抓取以及插销
端到端!首个开源视觉Transformer四旋翼控制避障方案!
机器狗与机械臂抓取调试中
无需额外训练!SAMPro3D:零样本3D分割一切!
[ICRA2021] 基于自动行为树的机械臂系统异常处理框架
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
腿式机器人的多接触惯性估计与定位 [论文在审稿中]
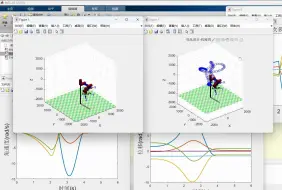
六自由度机械臂多项式关节空间轨迹规划算法【3次多项式、5次多项式插值法、353多项式】
极快跟踪一切!DOT:无惧遮挡!
IROS复现:基于DDPG的机械臂抓取训练(sim2real)
中科院新作!即插即用的meshing模块!精确构建无动态mesh地图,还能纠正里程计!
如何进行三维重建?从单帧深度估计到完整模型重建
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
牛津VGG团队最新开源!Flash3D:一张图像重建整个3D场景!通用性超强!
拥有自我意识萌芽的机械臂
盘点那些有趣的开源机械臂6
点云3D深度学习模型与实践
五分钟开发一款自己的点云处理软件(python)
惯性导航简介
机械臂启动,已经很稳不抖了哈哈哈
国内首个面向具身智能方向的理论与实战系统课程
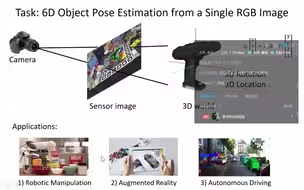
基于几何信息指导的单目6D物体姿态直接回归算法
四旋翼飞行器:算法与实战
Splatam:用于稠密RGB-D SLAM的3D高斯的溅射、跟踪和建图
双目相机标定基础及标定实战
5分钟 带你轻松开发USB虚拟串口 手把手教你做USB-CAN(4)
开源!自制低成本的机械臂自动分拣流水线
【UE5展馆】P1-基于类展馆Demo,如何玩转鼠标?鼠标不同模式下的操作切换?Pawn旋转/机械臂缩放/基于屏幕XY位移,
自动驾驶中实战课之Lidar与IMU的同步实战
六自由度机械臂+RRT路径轨迹规划算法仿真
四元数基础
无人机-PID算法详解与实战
最新CVPR2020论文:SuperGlue(超级胶水):用图神经网络来做图像匹配,超越现有所有匹配算法
盘点那些有趣的开源机械臂2