V
主页
京东 11.11 红包
四旋翼无人机-实际飞行测试
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
四旋翼无人机-PX4控制算法原理
四旋翼无人机-ADRC整体介绍
四元数基础
四旋翼飞行器:算法与实战
四旋翼无人机-PX4控制算法代码
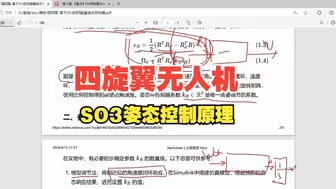
四旋翼无人机-SO3姿态控制原理
四旋翼无人机-TD跟踪微分器原理与仿真
PID控制器原理讲解
四旋翼模型简介-御风250模型
无人机-PID算法详解与实战
从零开始制作四旋翼无人机 EP01 - 硬件原理图与PCB介绍
中国科大 | 性能增强的四旋翼运动规划器用于复杂动态环境中的自主飞行
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
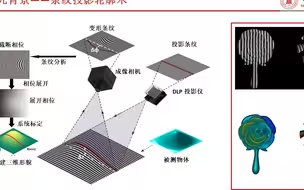
光学3D测量技术原理及应用
手搓一枚制导火箭:00后B站硬核UP主LShang001
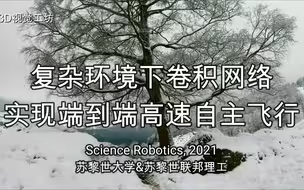
Sicence子刊,复杂环境下卷积网络实现端到端高速自主飞行!
点云3D深度学习模型与实践
ICRA2021,这台无人机不怕撞机!狭小环境下无人机弹性碰撞自主导航!
极快跟踪一切!DOT:无惧遮挡!
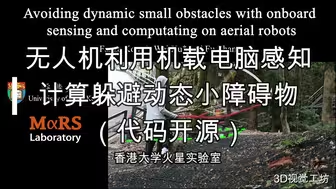
香港大学火星实验室:无人机利用机载电脑感知计算躲避动态障碍物
【自制】F405飞控(开发记录)
端到端!首个开源视觉Transformer四旋翼控制避障方案!
ICLR‘24 Spotlight 首个十亿级别3D通用大模型
无人机|几何约束下多旋翼无人机的全状态在线轨迹规划
高速结构光三维面形测量方法
公开课|基于PX4的四旋翼建模与控制
【3D视觉工坊】第十三公开课:基于格雷码结合相移技术的高鲁棒性高效率动态三维面形测量
深度相机概述
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
基于单张图片的3D人脸重建概述
让NeRF动起来!PhysGaussian:生成任何物体的真实运动!
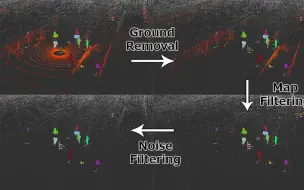
军事技术大泄密!多旋翼无人机移动平台自动降落算法,可应用航母上无人机自动降落
有了这个算法,你的无人机再也不怕撞鸟了,IROS2021,事件相机+目标检测+轨迹预测!
无人机—互补滤波姿态估计、卡尔曼滤波姿态、高度估计
CVPR2024开源NetTrack:跟踪高动态物体!
无人机|PID算法详解与实战(上)
ECCV'24 | 更快更准!Meta最新FPV-NeRF:将NeRF完美应用FPV!
CVPR2023:不使用任何3D数据标签,零样本学习3D场景理解
不炸就是胜利 100块组装五寸穿越机
自动驾驶中实战课之Lidar与IMU的同步实战