V
主页
无人机|几何约束下多旋翼无人机的全状态在线轨迹规划
发布人
「3D视觉从入门到精通」知识星球特邀嘉宾 主讲嘉宾: 汪哲培,浙江大学智能系统与控制研究所ZJU-FAST实验室在读博士生,师从许超教授和高飞特聘研究员,主要研究领域为无人机自主导航和运动规划。 主要 内容: 1. 多旋翼运动规划和计算最优控制浅谈; 2. 无人机导航的基本框架; 3. 几何约束多旋翼轨迹优化:一种通用方法; 4. 无人机导航的各种SOTA方法 小助理微信:CV_LAB
打开封面
下载高清视频
观看高清视频
视频下载器
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
无人机|PID算法详解与实战(上)
最新!无人机动态环境感知&规划新思路!
四旋翼飞行器:算法与实战
【3D视觉工坊】第十四期直播 慕尼黑工业大学博士详解室内SLAM中的几何约束
有了这个算法,你的无人机再也不怕撞鸟了,IROS2021,事件相机+目标检测+轨迹预测!
PID控制器原理讲解
IROS2022:无人机自主规划最快线路,赛道时速60km!
无人机-PID算法详解与实战
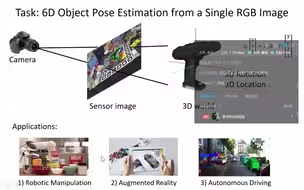
基于几何信息指导的单目6D物体姿态直接回归算法
四旋翼模型与控制基础
【3D视觉工坊】第十六期 视觉惯性SLAM之多约束扩展卡尔曼滤波
六自由度机械臂+RRT路径轨迹规划算法仿真
Sicence子刊,复杂环境下卷积网络实现端到端高速自主飞行!
无人机自主探洞!大规模三维环境中无人机基于图的拓扑探索规划(ICRA2021)
多视图几何MVS简介及MVSNet如何高效入门?
IEEE IROS 2019,最新无人机飞控算法,在未知环境下的无人机快速安全航迹规划(代码开源)
四元数基础
清华搞定无人机!LVCP:雷达-视觉紧耦合协同定位!无需先验地图和初始位姿!
中国科大 | 性能增强的四旋翼运动规划器用于复杂动态环境中的自主飞行
5分钟上手穿越机!平替avata!别再花6988入坑穿越机了! BETAFPV_云鹰16测评
ECCV'24 | 更快更准!Meta最新FPV-NeRF:将NeRF完美应用FPV!
ICRA2021,这台无人机不怕撞机!狭小环境下无人机弹性碰撞自主导航!
让NeRF动起来!PhysGaussian:生成任何物体的真实运动!
香港大学火星实验室:无人机利用机载电脑感知计算躲避动态障碍物
IROS 2021:基于上下文和方向的自动驾驶深度学习感知轨迹规划
四旋翼模型简介-御风250模型
GPA:凝视增强感知系统,视觉辅助无人机安全飞行(ICRA2021)
SCIROBOT2023 港大开源一种用于自主导航的具有扩展传感器视场的自旋转单驱动无人机!
无需额外训练!SAMPro3D:零样本3D分割一切!
⚡️⚡️德国穿越机⚡️⚡️
从零搭建一套结构光3D重建系统 [理论+源码+实践]
无人机送水上黄山了!日均运载超 2 吨物资
牛津VGG团队最新开源!Flash3D:一张图像重建整个3D场景!通用性超强!
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
西工大仿“萤火虫”通信无人机取得新突破
MIT最新研究,新一代微型、敏捷的类昆虫飞行器,每秒可拍动近500次翅膀!
机械臂抓取-开发环境搭建
IROS 2021,使用事件相机对电力线路进行巡查,线路寿命增加十倍!代码开源!
Voxfield:用于在线规划和 3D 重建的非投影符号距离场