V
主页
具身智能开源工作试玩:VIMA
发布人
-相关资料我整理到了个人博客中,欢迎查看: https://blog.csdn.net/weixin_43332715/article/details/135057961?csdn_share_tail=%7B%22type%22%3A%22blog%22%2C%22rType%22%3A%22article%22%2C%22rId%22%3A%22135057961%22%2C%22source%22%3A%22weixin_43332715%22%7D https://blog.csdn.net/weixin_43332715/article/details/135023319?spm=1001.2014.3001.5501
打开封面
下载高清视频
观看高清视频
视频下载器
Nvidia具身最新成果:GR00T-Control引领人形机器人智能控制
【SLAM-2024】第五届全国SLAM技术论坛-上海交通大学-卢策吾-具身智能的PIE模式研究
【机器人科学III】让机器人拥有类人触觉感知,哥伦比亚大学机器人实验室最新进展
科研案例|基于 PyBullet 的具身智能软硬件平台 BestMan
英伟达新利器fVDB:开启生成式物理智能 AI 的新时代
RLBench官方教程1——界面和代码框架介绍
AI奇点说 | 第九期:未来走进现实,机器人开始“上岗”你准备好了吗?
开源工作:Awesome-IPA (欢迎大家参与)# 中文版教程
物理AI、机器人与自主性的未来:NVIDIA的全面技术布局
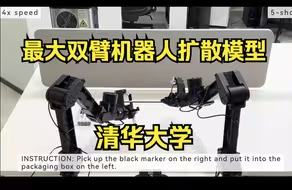
RDT-1B:解密全球最大的双臂机器人扩散大模型
清华重磅开源RDT-1B:全球最大双臂机器人扩散基础模型
🎉【免费开源】真的太不错拉,确实效果很赞,OCR-2.0:端到端模型,免费开源,统一模型,智能识别新体验!
英伟达黄仁勋直言人形机器人具身智能的时代来临
MoveIt与Isaac Sim结合使用
讲座 | 高泛化及样本高效的具身智能决策方法——清华大学智能产业研究院(AIR)在读博士李健雄
李飞飞团队佳作不断:聚焦机器人抓取交互,让机器人操作真正地适应各种环境
【36氪】机器人暴打机器人?现在的行业风口具身智能到底是个啥?
具身智能公司及产品的讨论
手写DiffusionPolicy【1】:最简单的机器人操作
具身智能机械臂实操入门课程-03:机械臂的数据集录制与模型训练
RobotKeyframing:四足机器人学习高层次目标的运动|2024【迪士尼】
NVIDIA Robotics: 从云端到边缘的AI驱动创新
网友搞出世界最小开源端到端人形机器人,极简DIY成本仅2500
四足机器人ROS PID控制原理讲解
Lec8-1: Mujoco Tutorial- 仿真原理,核心模块,与机器人仿真器
人形机器人及具身智能创新论坛暨人形机器人具身智能标准发布会在沪顺利举办
众擎——旗舰级ENGINEAI SE01人形智能体
使用Isaac Sim和ROS2实现大田农业机器人
具身大模型新进展:星尘智能与π0官宣合作,最强AI机器人再进化!
NeurIPS'24 | 原语驱动的世界模型 PIVOT-R实现任务泛化与效率双重 提升,成功率超过谷歌RT-1 26.6%
《具身智能入门与 gym 仿真实战 》人形机器人 | 四足狗 | 运动控制【课程试看】
强推!Ollama+Chatbox搭建本地大模型,一键加载安装多个gguf开源大模型!
AIRBOT Play示教功能|一个人就是万马千军 轻量化六自由度智能#机械臂,一人也能轻松指挥,同步动作。
PI:通用机器人控制的VLA流模型
云深处发布托马斯回旋风火轮足机器人
【tdxtrader】通达信连接QMT自动化下单(开源免费)
【走进珂学】举one反three 我们大健康机器人带给您的体验就是独one无two的
【Tokyo Robotics】人形机器人Torobo通过深度预测学习掌握擦桌子技能
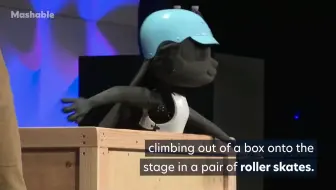
迪士尼溜冰机器人原型
使用Isaac Sim和ROS2控制机器狗指南