V
主页
VID_20200803_132255
发布人
当时是用的权盛的pixhawk APM固件,3.6.11苍穹四轴给的固件,莲花湖边飞,用GPS,之前已经在莲花湖边用权盛的pixhawk 靠GPS定点飞成过了,后来去飞了多次,好像主要是想看看它定点定得稳不稳,因为后面准备进一步做无人机SLAM,实际定得可能没有那么稳,特别是有风时,当时还想调参啥的调得稳点,其实后来也没调,后来真正结合T265做成无人机SLAM其实定得还可以,在室外,室内也还可以,我B站放了视频的。
打开封面
下载高清视频
观看高清视频
视频下载器
VID_20200825_162332
VID_20200701_192533 无名 openmv
VID_20200713_140132,b参数改为2.8第一次飞,室内稳如狗
VID_20200831_165834
我的ACfly F330拆之前再拍一次(更高清)VID_20201027_142832
VID_20200709_114756,b为默认的5.5,第一次飞ACfly
VID_20200717_093214,b为2.8,单激光测高+光流,看看能不能飞到6米以上高度,看博文记录应该是飞了9-10米的
VID_20200120_165545 当时刚买的无名飞控整机拍的视频
VID_20200730_095757,莲花湖湖面上权盛pixhawk GPS定点飞
VID_20200718_094242,b参数为2.8,第一次装GPS模块飞,飞到十几米二十米高。
VID_20200713_163741,b参数改为2.8后第一次尝试室外飞高,飞到3,4米
基于bag包跑一下今天刚看到的基于SVO改的SchurVINS 20240417_132838
APMT265树莓派第一次室内飞VID_20200903_150643
VID_20200730_095518,莲花湖边飞权盛的Pixhawk,第一次实现pixhawk GPS定点飞!!!!!!!昨天其实在院子里已经可以定点模式飞
测试机初始配置校准好后第一次飞,室外GPS定点飞VID_20201120_122328
VID_20201007_152254 截取合并,BJ首飞出现的一些问题
VID_20200716_164643,b为2.8,装了优象焊的光流模块,装上激光测高,超声波也插着,再次高飞,应该高的有6.7米左右,也是飞得最长的一次,4分
第一次真正意义上APMT265完整定点飞成!!!VID_20200901_145440
无人机cartographer+move_base VID_20220522_184019
再次更换电机依旧没有解决,感觉应该是电调三相线出问题,可能天行者太水了VID_20201020_121200
用fiesta基于位姿和深度图构建ESDF地图操作演示 20240317_091326
第一次飞ACfly-猛禽360 VID_20201103_121832
第一次实飞两个机子的ego-swarm VID_20220817_152558
ACfly-T265第九次飞,人走到T265前面拍摄,后来不小心碰到油门炸机,挺可惜的VID_20201109_163141
你舍不得买的车,别人站起来蹬。。。DJI的新车安流,一天玩炸了。。。
ACfly-T265第三次飞,纯T265,也是第一次真正完整飞成VID_20201107_163144
VID_20200111_182113 正点原子的minifly
VID_20190803_195125无人机rao gan飞行(非原创)
QQ视频_44B41225E921A2E1393125D45AFC1272
VID_20200716_141352,b为2.8,装上优象给我焊的光流模块,尝试飞到6米左右高度
无人机起飞前看T265的参数是否稳定,基本是毫米级跳动,也看无人机是否朝向正北,这也是第一次真正飞成前拍的VID_20200901_145226
发期望姿态+推力实现无人机悬停和走轨迹 VID_20220327_173714
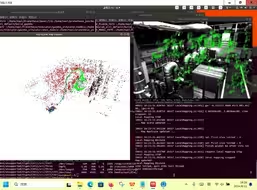
euroc数据集跑高翔的ORB-YGZ-SLAM 不基于ROS 20240811_162252
ACfly-T265炸机后拍VID_20201109_163647
智能无人机课程 12 ros gazebo
剁椒鱼头试飞
VID_20200720_193310,b为2.8,第一次室外空旷地飞,莲花湖边,刚插电就有GPS信号,最高飞20米,GPS定点很稳,姿态也稳,可能没什么风。
这就是对地!-2024cuadc备赛
拼夕夕55块的“穿越机”爽飞
ACfly-T265第一次飞(求稳同时装了TFmini)VID_20201107_125411