V
主页
【3D视觉工坊】第八期公开课:立体视觉之立体匹配理论与实战
发布人
直播地址: 在本公众号后台,回复「立体匹配」,获得线上直播课件。 主讲嘉宾: 武汉大学摄影测量学博士,现为某科技公司算法主管与技术合伙人,主要研究基于影像的立体匹配和三维重建,包括立体匹配、点云融合、网格构建、网格处理等,「3D视觉从入门到精通」星球嘉宾 课程大纲: 1.立体匹配理论概述 2.立体匹配实战入门
打开封面
下载高清视频
观看高清视频
视频下载器
ORB-SLAM3系列之特征匹配(三 MLPnP,词袋模型)
大作业|激光-视觉-IMU-GPS融合SLAM算法
双目相机标定基础及标定实战
绪论|单目相机标定理论及张正友标定法(上篇)
LVI-SAM代码实战与评估
【新课标2024最新版】【3年级起点外研社三年级上册教材同步讲解】【第1单元】
LightGlue:最强轻量级特征匹配?
四旋翼模型与控制基础
【新课标2024最新版】【3年级起点外研社三年级上册教材同步讲解】【预备单元】
Open3D与点云处理简介(公开课)
高速结构光三维面形测量方法
CVPR23开源 超越LoFTR!大尺度变化下的特征匹配!
【3D视觉工坊】第十四期直播 慕尼黑工业大学博士详解室内SLAM中的几何约束
三维点云系列视频——第一章绪论
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM传感器基本原理
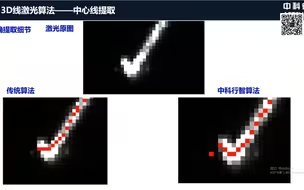
3D线激光相机检测技术解析与应用分享
公开课|基于PX4的四旋翼建模与控制
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM精讲(下)
【3D视觉工坊】第十六期 视觉惯性SLAM之多约束扩展卡尔曼滤波
CVPR2021,基于多视点鱼眼图像的实时球面扫描立体成像
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统
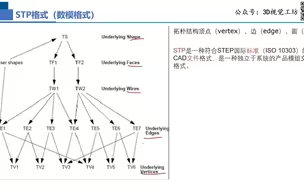
Open3D-三维数据结构
传感器与遥控器校准原理
【3D视觉工坊】第四期公开课:求职经验分享
3DGS SLAM最新SOTA | 使用视觉、深度和惯性测量进行SLAM的多模态3DGS
OA-SLAM:在视觉SLAM中结合物体语义进行相机重定位[ISMAR 2022]
2.4倍加速!PRAM最新开源的视觉定位模型!解锁以地图为中心的学习!
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
面向大尺度室内场景的主动式重建方法(公开课)
重磅开源SA-GS:重新定位最新大场景3D重建SOT
基于单张图片的3D人脸重建概述
四旋翼无人机-PX4控制算法代码
牛逼!竟然用3天一口气学完pytorch入门基础【线性回归、逻辑回归、神经网络、梯度下降】等十大算法原理及实战!通俗易懂,比啃书强太多了!机器学习|深度学习
CVPR2023开源 无纹理和重复纹理也能实现鲁棒的特征匹配!
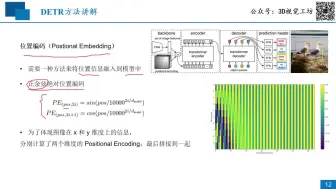
慕尼黑工业大学萌妹子开讲!DETR-如何用Transformer做目标检测?
SolidWorks钣金设计教程全集(钣金展开、折弯、拆图、焊件结构等)
高斯抛雪球SLAM
ECCV'24开源 | DoubleTake深度估计& 三维重建最强解决方案!
自动驾驶中的深度学习模型部署实战-数据预处理NPP库介绍及CUDA编程模型之线程操作
ORB-SLAM3基本原理与系统架构