V
主页
6-15视觉里程计-运动估计2D-to-2D对极约束
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
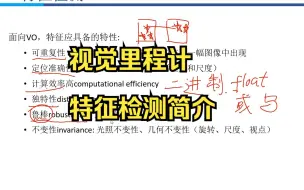
6-10视觉里程计-特征检测简介
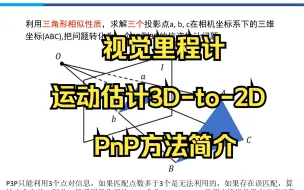
6-17视觉里程计-运动估计3D-to-2D PnP方法简介
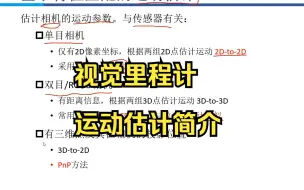
6-13视觉里程计-运动估计简介
6-9视觉里程计简介
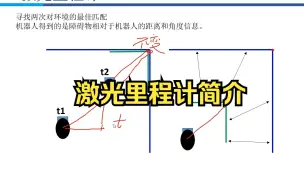
6-6激光里程计简介
6-11视觉里程计-特征检测ORB算法
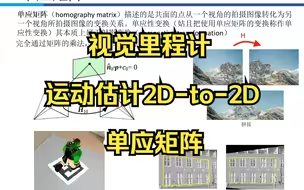
6-16视觉里程计-运动估计2D-to-2D单应矩阵
6-14视觉里程计-运动估计2D-to-2D-相机基础
1-2初识移动机器人
6-12视觉里程计-特征匹配
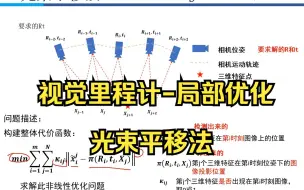
6-18视觉里程计-局部优化-光束平移法
6-7激光里程计的迭代最近点ICP算法简介
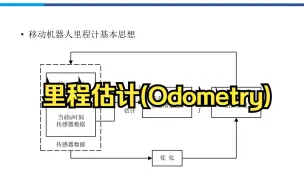
6-2里程估计(Odometry)
2-1自主移动机器人-预备知识-序言
1-1机器人的基本功能类型
6-4里程估计方法-基于电机码盘
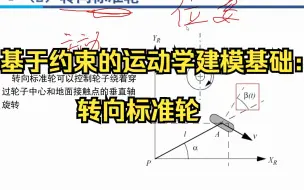
3-15自主移动机器人-基于约束的运动学建模基础:转向标准轮
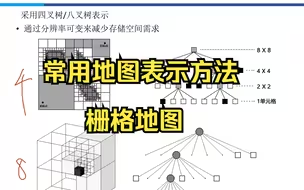
5-4常用地图表示方法-栅格地图
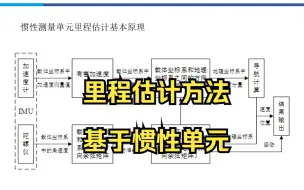
6-5里程估计方法-基于惯性单元
1-5移动机器人的分类-轮式履带足式躯干
4-35移动机器人平面运动轨迹规划方法-参数优化法
6-19视觉里程计总结
4-9拓扑连通图构建方法--概率完备(PRM法)
6-10笛卡尔空间轨迹规划和实现思路
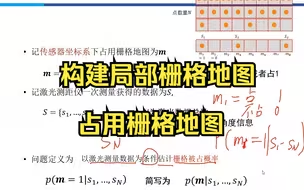
5-9构建局部栅格地图-占用栅格地图
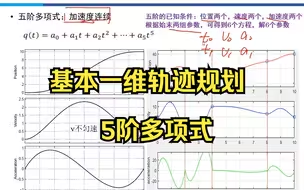
4-27基本一维轨迹规划-5阶
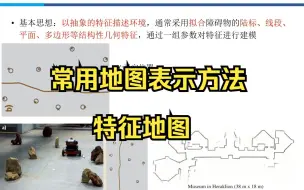
5-5常用地图表示方法-特征地图
1-3移动机器人的定义
4-4工作空间与位形空间
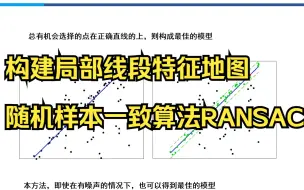
5-13构建局部线段特征地图-随机样本一致算法RANSAC
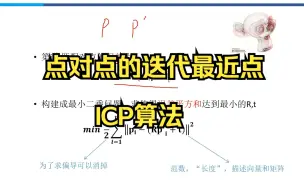
6-8激光里程计-点对点的迭代最近点ICP算法
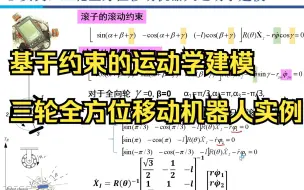
3-22自主移动机器人基于约束的运动学建模-三轮全方位移动机器人实例
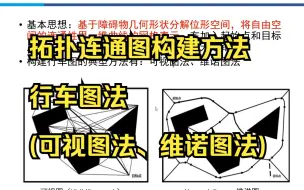
4-6拓扑连通图构建方法--行车图法(可视图法、维诺图法)
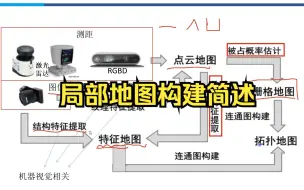
5-8局部地图构建简述
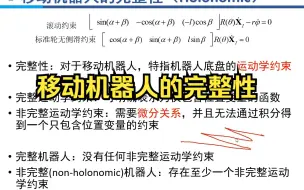
3-29移动机器人的完整性
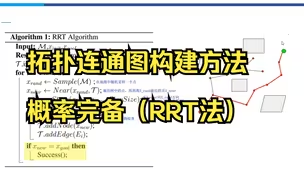
4-10拓扑连通图构建方法--概率完备(RRT法)
4-28基本一维轨迹规划小结
5-2常用环境感知传感器
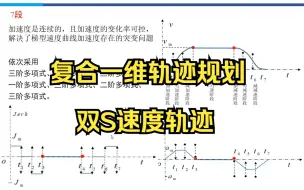
4-30复合一维轨迹规划-双S速度轨迹
6-1路径描述及轨迹生成