V
主页
速度提高60倍!重建你的自动驾驶场景 | GaussianCity:无边界三维城市场景重建(南洋理工大学)
发布人
速度提高60倍!重建你的自驾场景 | GaussianCity:无边界三维城市场景重建(南洋理工大学)。原文链接:https://arxiv.org/abs/2406.06526
打开封面
下载高清视频
观看高清视频
视频下载器
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)
逆天了!NeRF-Casting:逼真重建和渲染高光泽目标
神经辐射场(NeRF)在学术界被替代?为何说3D高斯才是未来大势?附9篇必读论文和源码
ECCV2024 | 训练45秒,渲染300+FPS!MVSGaussian:高效且可泛化的混合高斯渲染方法
别再用SuGaR了!重磅开源SA-GS:重新定位最新大场景3D重建SOTA(上篇)
为自动驾驶构建城市规模的神经辐射场
速度快!MobileNeRF:移动端实时渲染方案,Nerf导出Mesh
Nerf+SLAM会擦出什么样的火花?
入门到精通!计算机视觉3D点云+三维重建手把手实战教学!整整85集,全程干货讲解,草履虫都能学!(人工智能丨深度学习丨论文写作丨研究生丨AI丨机器学习丨CV)
在线高精地图与城市NOA是什么关系?为什么如此重要?
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
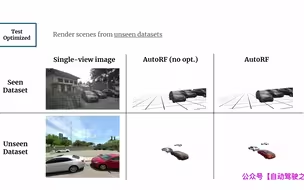
CVPR2022 | AutoRF:从单视角观察中学习3D目标辐射场(nuScenes和KITTI上表现良好)
爆肝整理!CVPR2024可复现论文合集,原文/代码/演示全都有!(深度学习/计算机视觉)
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
CVPR 2024 Highlight 从视频中进行类别无关的交互手和物体三维重建
单目视频/图像重建高质量人头数字人
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
相机标定任务概述 | 哥伦比亚大学相机模型与标定系列课程(1)
深度学习环境配置一套搞定:anaconda+pytorch+pycharm+cuda全详解,带你从0配置环境到跑通代码!
FreeScan Combo 可以重建人体的手持扫描仪
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
速度和精度双SOTA! TPAMI 2022最新车道线检测算法(Ultra-Fast-Lane-Detection-V2)
用于激光雷达视图合成和三维重建的瞬态神经辐射场
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
B站【最全YOLO系列】教程,全套36集付费内容,公认最适合新手入门YOLOv11目标检测实战系列,绝对通俗易懂好上手!深度学习_物体检测-人工智能/计算机技术
自动驾驶方向博士申请小白指南,看这个就够啦 !从论文准备到套磁导师!
【ECCV2022】首篇完全可微NeRF!Neural-Sim:学习使用NeRF生成训练数据(微软)
又快又准!一种基于图像表示的快速精确的LiDAR地面分割算法
【ICCV 2023】 CORE:协作重建助力多智能体协同感知!
面试必备!自动驾驶中BEV常考知识点大串讲
自动驾驶汽车是如何在高精地图中建立精确位置的?
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
前方高能,这27个变态AI,一定要偷偷用起来!
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
刷爆!【深度学习-图像分割】图像分割+语义分割Unet原理讲解及项目实战教程!(人工智能、神经网络、机器学习、机器学习算法、Unet论文、Unet医学)