V
主页
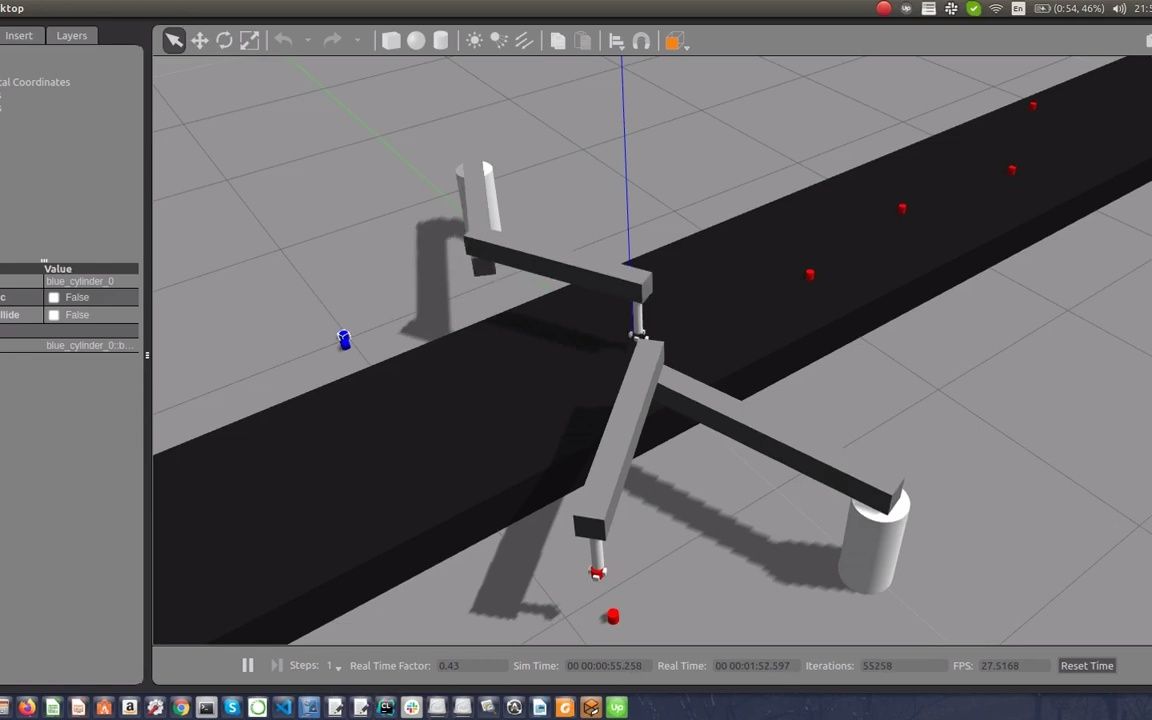
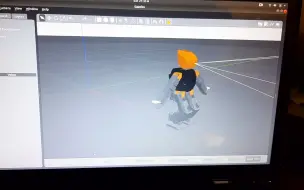
SCARA 使用 ROS 在 Gazebo 中拾取和放置任务传送带
发布人
网络
打开封面
下载高清视频
观看高清视频
视频下载器
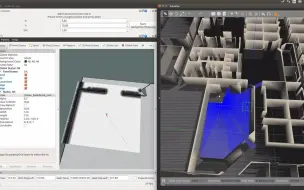
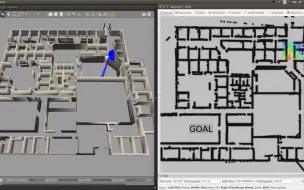
使用 Gazebo、Rviz、Hector SLAM 和 Octomap 在 ROS 中进行无人机自主导航、2D 和 3D 映射
SCARA 机器人 MATLAB-Simulink 仿真四自由度机械臂
ros如何在避开障碍物的同时进行导航
全轮ROS gazebo机器人
使用 ROS Moveit 和 OpenCV 执行拾取和放置动作的六自由度机械臂
使用 ROS 在 Gazebo 中模拟抓取机器人
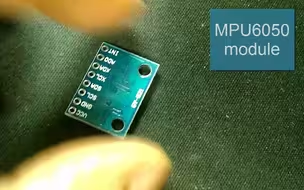
如何使用 Arduino 和 MPU6050 陀螺仪和加速度计传感器测量角度
物理搬运机器人 靶心识别
Gazebo 中的四足机器人仿真
使用 Arduino 控制步进电机 - 教程
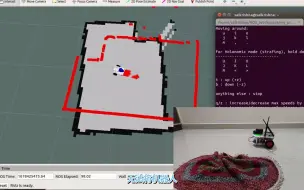
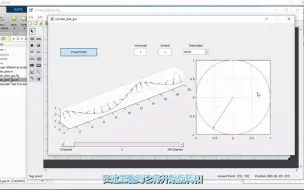
在 ROS 和 Gazebo 模拟上使用 Python 脚本绘制圆和避障
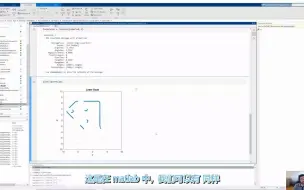
使用 Matlab 绘制频谱
具有 ROS 和 Gazebo 的四轮机器人,用于 SLAM 和导航
(开源)最迷你的ROS2 机器人,自动路径规划、视觉识别、人体检测跟随、手势识别控制、多形态切换(想要资料评论区留言安排!)
移动自主机器人中的传感器融合| IMU+车轮里程计
来自 IMU 传感器的 Roll Pitch Yaw 并在 RVIZ ROS 中对其进行可视化 | MPU6050
在 ROS 和 Gazebo 中使用 purepersuit 规划器进行 AGV 导航
单独PC上ROS-Gazebo仿真中DARWIN-OP机器人的MATLAB控制
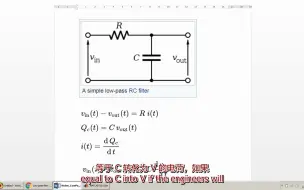
如何在 MATLAB 中使用 Simulink 设计简单的低通 RC 滤波器
RTK履带无人车户外曲线路径跟踪(精度3cm内)
写ROS大作业,但是调车
通过创建带有摄像头和激光雷达的自定义 4 轮机器人来学习 ROS 基础知识gazebo
(开源)哪吒 MiniROS 机器人结构安装视频(ROS2)
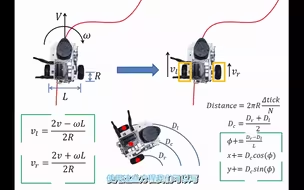
使用ROS的自主导航移动机器人 | 激光雷达 | 差动驱动运动学
使用 ROS 2、Gazebo 和 OpenCV 进行车道跟踪模拟
在 ROS 和 Gazebo 中使用激光雷达和 RGBD 相机的 RTAB-Map SLAM
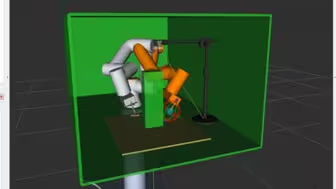
移动机械臂抓取
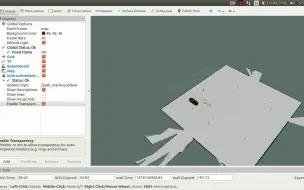
基于ROS的Ubuntu(20.04版本)环境下的自主导航的简单演示
最后还是用amcl定位才连续成功导航了三次
ROS 和 Gazebo 中 4 轮转向 AGV 的路径规划
使用 MATLAB Simulink 对车辆 HVAC 系统进行建模和分析汽车车载空调建模
ROS-Gazebo-Rviz-轨迹规划与跟踪算法合集__01_LQR&A_Star
ROS MoveIt规划场景中添加虚拟墙
从 Simulink 连接并部署到 ROS/ROS2 网络 | AUV 深潜,第 4 部分
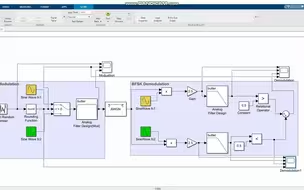
matlab使用simulink调制解调ask fsk psk qpsk tdm数字调制
通过 ROS 将gazebo环境与 Matab 结合
使用 ROS 的 gmapping 工具“学习”地图然后导航slam
MATLAB : 在 SIMULINK 中仿真交流电源和直流电源
使用 LSTM 和超参数调整的多元时间序列预测贝叶斯优化matlab程序
MATLAB 中的电磁波可视化